Clutter Doppler Frequency

direction
Figure 1: Stationary point targets in a moving radar beam

direction
Figure 1: Stationary point targets in a moving radar beam
Clutter Doppler Frequency
Clutter spreads in the Doppler domain due to platform motion. As the radar moves past two point targets from B to A, the doppler shift will vary approximately linearly with time, passing the zero frequency at boresight for zero squint. This Doppler shift approximates to a linear chirp, as the platform moves past the targets. Azimuth compression can be thought of as the compression of the Doppler signal produced during the integration length, R·φa. The Doppler bandwidth consists of the frequencies produced, as a result of scatterers falling in the beamwidth of the radar, as the platform moves past the targets. The Doppler bandwidth, for a narrow azimuth beamwidth, is thus given by:
| fD1 - fD2 = | 2v · φa | v = is the platform ground velocity φa = is the −3dB beamwidth λ = is the wave length of the radar. |
(1) |
| λ |

Figure 2: Dependency of the clutter Doppler frequency on the direction of arrival (velocity= 100 m/s)

Figure 2: Dependency of the clutter Doppler frequency on the direction of arrival (velocity= 100 m/s)
Using time-dependent frequency modulation as intrapulse modulation, the Doppler frequency must be „normalized” for further processing, i.e., the Doppler frequency must be divided by the sub-carrier spacing.
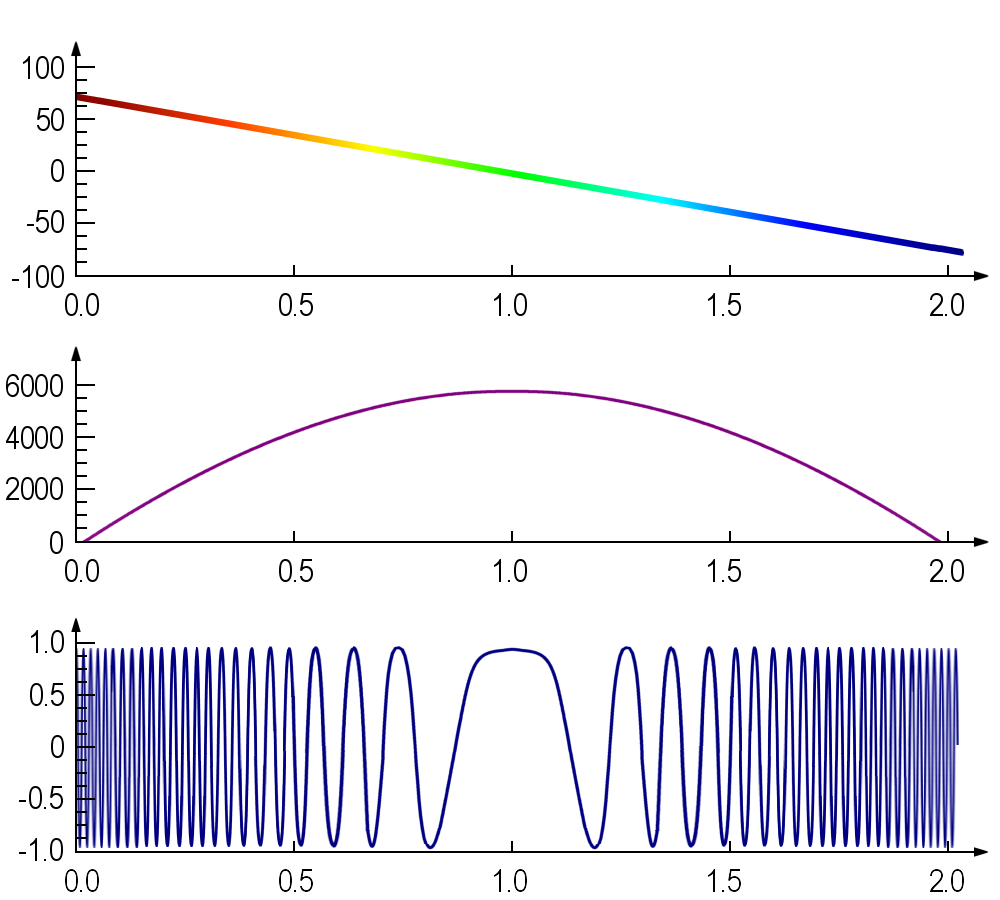
Figure 3: Progression of frequency, phase and amplitude of a point-scatterer

Figure 3: Progression of frequency, phase and amplitude of a point-scatterer
Moving Targets in SAR
Ideally, the SAR processor focuses the targets using the phase history. SAR processors usually assume that the scattering points within the SAR scene are stationary during the time of data collection. Each point within the scene is then characterized by a unique phase history, and the SAR processor exploits this uniqueness to place the point within the scene.
Depending on the particulars of the motion (direction, speed), the uncompensated phase may result in a wide range of phenomena, from a simple shift in position of the target (constant direction and speed during the measurement) to a smearing making the target impossible to see (changing of direction or speed during the measurement). E.g. you can see this phenomen in radarmaps of maritime scenes, that the ships are depicted beside its own bow wave. Moving targets in SAR images can be analysed and focused using time-frequency techniques. This makes it possible to differentiate moving targets from stationary background (Clutter) and to relocate the moving targets shift in position.