Селсин

Изображение 1: Един селсин прилича на трифазен двигател в миниатюрен вариант (диаметър: 1,5 инча).

Селсин
Въпреки че по конструкция селсина е подобен на двигател, задвижван с трифазен променлив ток, транскрибирането «ротационен сигнален трансформатор» описва най-добре неговата функция.

Bild 2: Drehmeldesystem in Indikatorschaltung

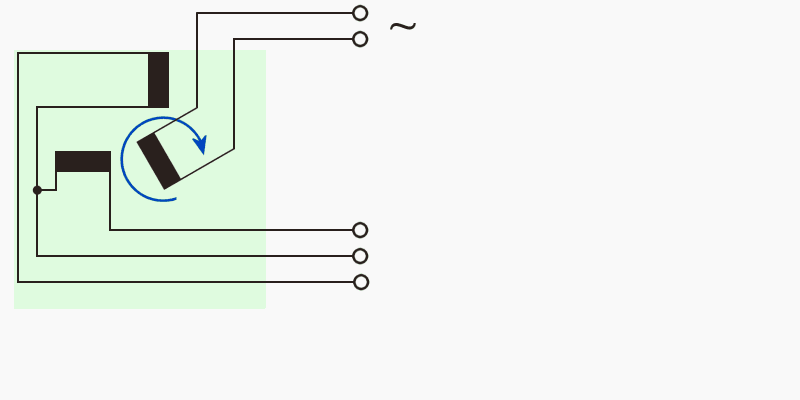
Изображение 2: Принцип на предаване на въртящия момент без механична връзка между главния и приемния механизъм
При въртенето на ротора на сензор за селищен контрол, чиято намотка се захранва с променливо еталонно напрежение URef, в намотките на статора се индуцира електродвижеща сила. В резултат на това в статорните намотки на двата селиона протича променлив ток. Магнитното поле, създадено от този ток в статорната намотка на приемника, взаимодейства с магнитното поле, създадено от тока, протичащ в роторната му намотка. Това кара ротора на синхроприемника да се върти, докато ъгловите позиции на двата синхророторни ротора не се уеднаквят.
Описаната схема се използва в случаите, когато необходимият въртящ момент на приемащата страна е малък. Например, когато радарната антена и стрелката на индикатора трябва да се въртят синхронно. Ако обаче необходимият въртящ момент от страна на приемника е значителен, към схемата се добавят сервоусилвател и серводвигател. Сервоусилвателят усилва напрежението на сигнала за грешка (сигнал за несъответствие), който след това се подава към двигателя на задвижването. Двигателят върти товарния вал и чрез механична обратна връзка - роторния вал на сеелсинхронния приемник. По този начин, когато роторите на двата селища достигнат едно и също положение, сигналът за грешка ще стане нула и въртенето на товара ще спре. Такава схема се използва например, когато антените на два или повече радара трябва да се въртят синхронно. Такива радари могат да бъдат, например, наблюдателен радар и свързан с него наземен радар. Освен това същата схема се използва за осигуряване на синхронно въртене на пускови установки за зенитни ракети, зенитни артилерийски оръдия и други системи.

Изображение 3: Типична схема на синхронно сервозадвижване, базирано на селин

В случаите, когато предаваната величина варира в малки граници, се използва едноканална схема за синхронно проследяване. Ако тази величина варира в значителен диапазон и освен това точността на предаването е важна, се използва двуканална синхронна задвижваща схема. Тази схема се състои от два синхронизатора, всеки от които е от предавателната и приемната страна. Единият от тези синхронизатори се нарича синхронизатор с централна скорост, а другият - синхронизатор с прецизна скорост. Оборотите на синхронизатора за грубо отчитане са по-големи от тези на синхронизатора за фино отчитане, което се осигурява от механична редукторна трансмисия. Например, ако съотношението между грубия и финия канал е 1:36, роторът на синхрона на грубата ос прави 36 оборота на един оборот на синхрона на фината ос. Това означава, че ако роторът за грубо отчитане се завърти на 10°, роторът за фино отчитане се завърта на цели 360°.
Резолвер
Фиг. 4: Функционален ротационен детектор (резолвер)

В някои приложения се използват друг тип електрически машини - ротационни трансформатори или резолвери. Те изглеждат подобно на селсинамите и също имат намотка на ротора и намотка на статора. Роторната намотка също пренася опорното напрежение. Разликата е, че напрежението, пропорционално на тригонометричните функции (синус и косинус) на ъгъла на ротора, се взема от статорните намотки. Такива устройства могат да се използват за осигуряване на радиално-кръгово движение на екрана на дисплея за кръгово виждане в синхрон с радарната антена. Освен това ротационните трансформатори се използват в аналогови изчислителни устройства, наричани още устройства за броене и разрешаване, които са били широко разпространени преди появата на цифровите изчислителни устройства.