Пасивні перешкоди в радіолокації

Рисунок 1. Радіолокатор приймає сигнали від усіх об’єктів, які попадають у діаграму направленості антени, включно із небажаними об’єктами.

Рисунок 1. Радіолокатор приймає сигнали від усіх об’єктів, які попадають у діаграму направленості антени, включно із небажаними об’єктами.
Пасивні перешкоди в радіолокації
Радіолокаційні сигнали відлуння породжуються практично всіма поверхнями, на які попадають випромінювані радіолокаторами електромагнітні хвилі. Тому поряд з сигналами відлуння від цілей існує багато небажаних сигналів різного походження (Рисунок 1). В радіолокаторах виявлення до небажаних сигналів зазвичай відносять шуми та перешкоди. Шуми розглядалися при викладенні основ радіолокації. Перешкоди поділяють на активні та пасивні. В контексті цього розділу (“Когерентна радіолокація”) нас будуть цікавити, головним чином, пасивні перешкоди, оскільки саме технологія когерентної обробки радіолокаційних сигналів дає змогу ефективно боротися з пасивними перешкодами. На Рисунку 2 показаний індикатор радіолокатора, на якому відображаються відмітки цілей та пасивні перешкоди різних видів.
В радіолокації пасивними перешкодами називають сигнали, відбиті від земної поверхні та місцевих предметів, від морської поверхні, гідрометеорологічних утворень (так званих гідрометеорів), птахів та комах. Слід відмітити, що визначення пасивних перешкод залежить і від призначення радіолокатора. Так, наприклад, сигнали, відбиті від гідрометеорів, не є перешкодами для метеорологічних радіолокаторів, призначених для виявлення та вивчення погодних явищ. Однак, наприклад, для радіолокаторів управління повітряним рухом такі сигнали будуть заважати та підлягають придушенню.
При розробці методів та пристроїв боротьби з пасивними перешкодами виходять з припущення, що літальні апарати, як правило, рухаються із швидкостями, які перевищують швидкості переміщення гідрометеорів. Цим же (наявністю швидкості) літальні апарати відрізняються й від місцевих предметів, які взагалі є нерухомими. Таким чином, якщо радіолокатор здатен розрізнити факт руху виявленого об’єкту та його швидкість, то це дає можливість не відображати на індикаторі небажані сигнали пасивних перешкод. Системи, які виявляють та обробляють тільки сигнали від рухомих цілей, називають системами селекції рухомих цілей, СРЦ (англ. Moving Target Indicators, MTI).

гідрометеорів
пасивна
перешкода
Рисунок 2. Індикатор кругового огляду радіолокатора управління повітряним рухом, на якому видні відмітки цілей та пасивні перешкоди

гідрометеорів
пасивна
перешкода
Рисунок 2. Індикатор кругового огляду радіолокатора управління повітряним рухом, на якому видні відмітки цілей та пасивні перешкоди
Пасивні перешкоди поділяють таким чином:
- Протяжні або площинні перешкоди – відбиття від земної або морської поверхні. Відбиття від земного рельєфу і місцевих предметів, як правило, є стаціонарними, за виключенням, наприклад, дерев, що колишуться під впливом вітру, що може призвести до появи допплерівського зсуву частоти відбитого від них сигналу. При цьому саме на використанні допплерівського зсуву частоти сигналів відлуння побудовані методи боротьби з пасивними перешкодами при обробці прийнятих радіолокаційних сигналів. Пасивні перешкоди від морської поверхні, у загальному випадку, також можуть мати допплерівський зсув частоти, спричинений відбиттям від морських хвиль, що рухаються.
- Об’ємні перешкоди – відбиття від гідрометеорів (хмар, областей опадів). Такі перешкоди створюють серйозні проблеми, оскільки відбиття, наприклад, від областей дощу або снігу можуть мати суттєві допплерівські добавки по частоті.
- Точкові перешкоди – відбиття від птахів, лопатей ветрогенераторів, окремих високих будівель і тому подібне. Рухомі точкові пасивні перешкоди іноді називають терміном „ангели“. Зграї птахів або рої комах можуть породжувати перешкоди, які буває важко селектувати через їхню схожість, за деякими характеристиками, з літальними апаратами.
Пасивні перешкоди можуть бути флюктуючими або нефлюктуючими. Відбиття від земної поверхні та від місцевих предметів, як правило, є нефлюктуючими, оскільки фізичні властивості таких об’єктів статичні. На відміну від них, відбиття від гідрометеорів, які рухаються під впливом вітру, вважають флюктуючими.
Пасивну перешкоду вважають однорідною, якщо щільність всіх відгуків є однаковою. Більшість протяжних та об’ємних перешкод розглядають на основі такої моделі, однак на практиці таке спрощення не завжди є коректним. Неоднорідними пасивними перешкодами називають такі перешкоди, амплітуда яких суттєво змінюється від осередку до осередку. Такі перешкоди зазвичай породжуються високими будівлями в районах щільної забудови.
Морські перешкоди
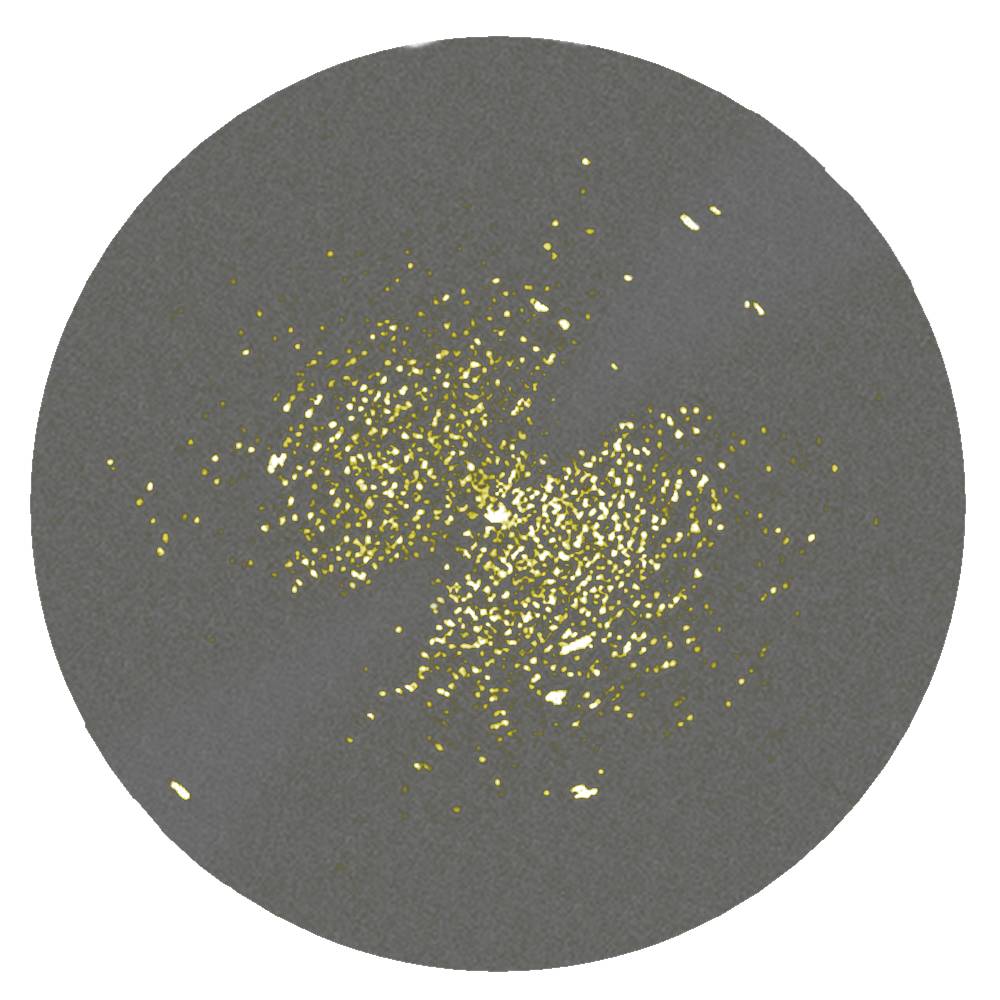
Рисунок 3. Морська перешкода на індикаторі кругового огляду

{kind=link}
Морські перешкоди – це відбиття від гребнів морських хвиль. Такі перешкоди також мають допплерівську добавку, спричинену впливом вітру. Це означає, що картина відбиття від морської поверхні з часом „уходить“, тоді як у випадку пасивних перешкод від земної поверхні вона залишається постійною. Тому на практиці придушення морських перешкод буде супроводжуватися деякими втратами у якості виявлення цілей.
Приклад морської перешкоди можливо побачити на Рисунку 3. В даному випадку вітер дує в напрямку близько 310° (північний схід) або в протилежному напрямку (нажаль, по індикатору кругового огляду неможливо визначити який знак, додатній або від’ємний, має допплерівський зсув частоти).
На відміну від цих напрямків, область, в якій радіальна швидкість хвиль є достатньо малою, добре „очищується“ від пасивних перешкод системою селекції рухомих цілей.
Карта перешкод

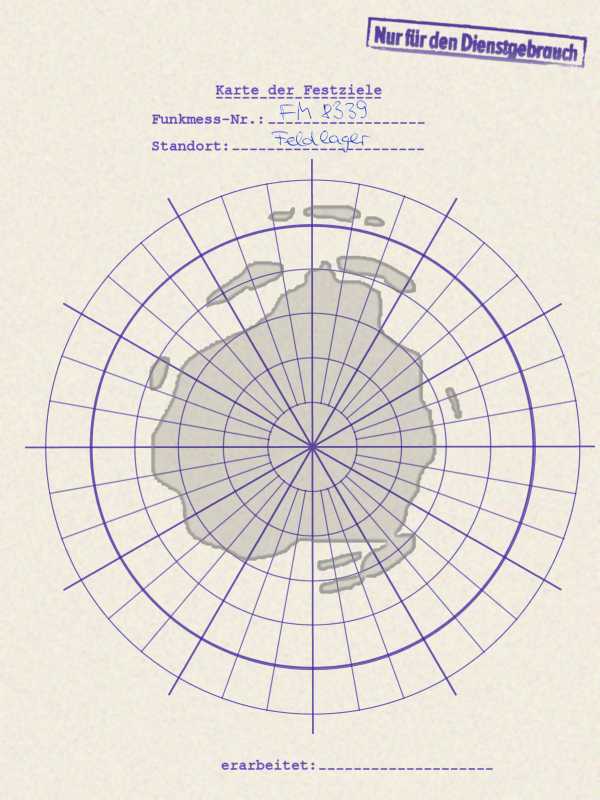
Рисунок 4. Приклад карти місцевих предметів на паперовому бланку
{kind=link}
Даний метод зберігся з часів аналогових радіолокаторів, коли всі функції радіолокатора виконувались оператором по картинці, яка відображається на екрані індикатору кругового огляду. В теперішній час цей метод використовується тільки у випадках, коли всі інші пристрої СРЦ вийшли з ладу: оператор запам’ятовує конфігурацію (карту) пасивних перешкод навколо радіолокатора, щоби виявляти ціль на їхньому фоні. Для цього оператор завчасно складає карту перешкод (карту місцевих предметів) для поточної позиції радіолокатора. Карта наноситься на спеціальному бланку, приклад якого наведено на Рисунку 4.
Статистичний метод з картою перешкод
З появою можливості використання комп’ютерів для обробки радіолокаційних сигналів метод, заснований на використанні карти перешкод отримав подальшій розвиток. Значення оцифрованого сигналу зберігаються у вигляді чисел (слів даних) для кожного азимутального напрямку і для кожного осередку дальності. Дані числа порівнюються між собою в кожному огляді радіолокатора. Інформація в осередку виводиться на відображення тільки якщо число в ній в поточному огляді суттєво відрізняється від числа, записаного у попередньому огляду.