Visibilité sous fouillis et facteur d’amélioration
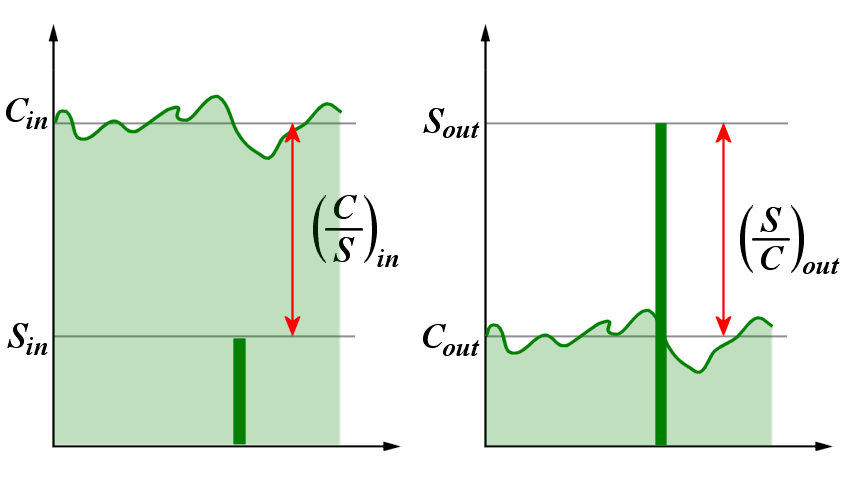
Figure 1 : Rapport entre le signal S et les échos parasites C à l’entrée et la sortie du programme de Visualisation des cibles mobiles (VCM)

Figure 1 : Rapport entre le signal S et les échos parasites C à l’entrée et la sortie du programme de Visualisation des cibles mobiles (VCM)
Visibilité sous fouillis et facteur d’amélioration
La performance de détection d’un radar comporte deux paramètres: le facteur d’amélioration (If) et la visibilité sous fouillis.
Le terme de visibilité sous fouillis (VSF) décrit la capacité du module de traitement des échos radars à pouvoir extraire le signal de cibles mobiles dont l’intensité des échos est inférieures aux échos parasites ambiants. Le tout étant obtenu avec un rapport signal sur bruit, une probabilité de détection et un taux de fausses alarmes donnés. Il exprime l’efficacité du programme de Visualisation des cibles mobiles (VCM) et doit être calculé par rapport à la performance de détection d’un écho fixe à la limite d’intensité des échos parasites.
Le facteur d’amélioration (If) est défini comme le rapport signal sur bruit à la sortie du filtre des échos parasites, moyenné uniformément sur tous les cibles d’intérêt. Cette définition inclue le gain du signal et l’atténuation des échos parasites. Avec l’utilisation d’une fréquence Doppler, ce facteur est exprimé comme:
| If = (C/S)entrée · (S/C)sortie = | Centrée | · Gmoy | où | Centrée = = intensité des échos parasites à l’entrée du filtre; Csortie = intensité des échos parasites à la sortie du filtre; Gmoy = gain moyen du filtre pour les cibles mobiles. |
(1) |
| Csortie |
La visibilité sous fouillis est le rapport entre le facteur d’amélioration et le rapport signal sur bruit des parasites minimum que le programme de Visualisation des cibles mobiles a besoin pour faire une détection avec une probabilité de détection donnée.
| VSF = | If | VSF = Visibilité sous fouillis S/F = Rapport signal sur bruit des parasites |
(2) |
| (S/F)sortie |
Par exemple, un radar ayant une visibilité sous fouillis de 20 dB sera capable de détecter une cible mobile dont les échos sont plusieurs centaines de fois sous le niveau des échos de fond. Typiquement, les manufacturiers produisent une visibilité sous fouillis de 30 dB ce qui permet de détecter des cibles ayant une surface équivalente radar d’à peine 0,5 m2 même dans une environnement ayant des échos de sol, de mer ou des précipitations importantes.
Lorsqu’on compare la visibilité sous fouillis de systèmes radars différents, il faut se souvenir que l’intensité des échos parasites dépend de la cellule de résolution sondée qui peut différer d’un système à l’autre. La comparaison n’est donc bonne que pour des radars ayant la même largeur de faisceau et longueur d’impulsion.
Le terme Visibilité sur-fouillis décrit la capacité d’un radar (ou son opérateur) à reconnaître un écho de cible qui est plus fort que les échos parasites, généralement pour les radars sans programme de Visualisation des cibles mobiles. Il est utilisé pour les radars peu coûteux utilisés dans un environnement ayant des échos de mer.
Un radar peut se retrouver dans une environnement où les échos parasitaires varient considérablement d’intensité d’un point à l’autre. Dans une telle situation, la détection des vrais échos peut être limitée aux zones parasitaires moins intenses par une méthode dite « visibilité inter-fouillis » (VIF). Ce traitement utilise généralement une carte des échos permanents pour faire le travail.