Внутрішньоімпульсна модуляція та стискання імпульсу

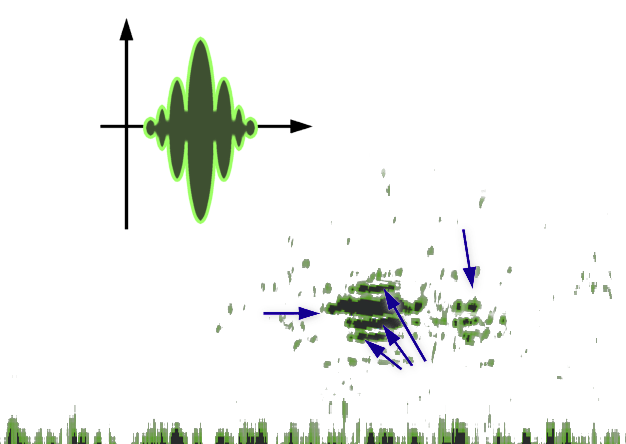
Рисунок 1. Сигнал на вході (ліворуч) та на виході (праворуч) фільтру стискання. Прийнятий сигнал на фоні шумів практично не виділяється, але після фільтру стискання спостерігається виразний сигнал відлуння

Рисунок 1. Сигнал на вході (ліворуч) та на виході (праворуч) фільтру стискання. Прийнятий сигнал на фоні шумів практично не виділяється, але після фільтру стискання спостерігається виразний сигнал відлуння
Рисунок 1. Сигнал на вході (ліворуч) та на виході (праворуч) фільтру стискання. Прийнятий сигнал на фоні шумів практично не виділяється, але після фільтру стискання спостерігається виразний сигнал відлуння
Внутрішньоімпульсна модуляція та стискання імпульсу
Стискання імпульсу – це загальний термін, який використовується для позначення процесу формування зондувального сигналу, що відбувається під час змінення сигналу в залежності від електричних характеристик лінії передачі. Несівне коливання зондувального сигналу (його внутрішня структура) модулюється по фазі або частоті, що під час приймання сигналів відлуння дає можливість застосування спеціальних методів, які дають змогу розділяти в просторі цілі, відгуки яких перетинаються. Такий вид модуляції називають внутрішньоімпульсною. Метод, що полягає у стисканні імпульсів, був розроблений з метою збільшення імпульсної потужності за рахунок стискання імпульсу в часі. Цей метод суміщає в собі переваги зондувальних сигналів великої тривалості (висока енергія) із перевагами зондувальних сигналів малої тривалості (високе просторове розрізнення). На Рисунку 1 показані приклади сигналів на вході та на виході елементу тракту обробки, що реалізує метод стискання імпульсу.
В імпульсних радіолокаторах застарілих типів для досягнення потрібної дальності дії необхідно було розвивати високу імпульсну потужність. Водночас зондувальний імпульс мав бути коротким, наскільки це можливо, оскільки цей параметр (тривалість імпульсу) визначає роздільну здатність радіолокатора з дальності. В радіолокаторах такого типу потрібно було генерувати та випромінювати велику потужність протягом кількох мікросекунд або навіть наносекунд. Для цього були розроблені потужні модулятори та потужні генераторні прилади у вигляді електронно-вакуумних ламп.

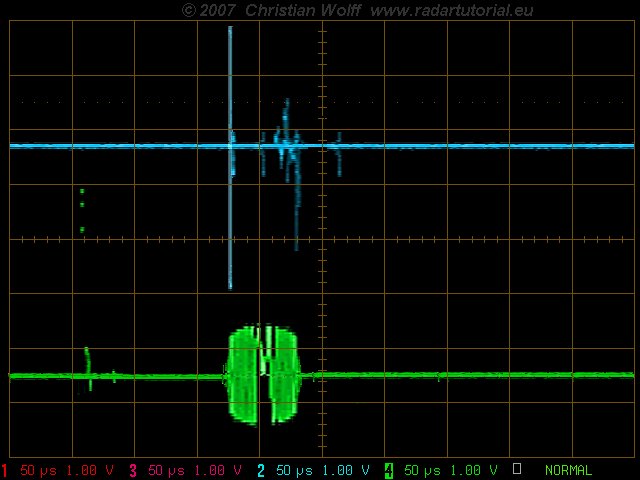
Рисунок 2. Короткий імпульс (блакитний) та довгий імпульс із внутрішньоімпульсною модуляцією (зелений)

Рисунок 2. Короткий імпульс (блакитний) та довгий імпульс із внутрішньоімпульсною модуляцією (зелений)
Використання твердотільної технології не дає можливості отримати такі імпульси високої потужності. Електронні прилади, на використанні яких заснована ця технологія (як правило, транзистори) мають кінцеву електричну міцність та обмежену робочу температуру. Значить для отримання таких самих значень випромінюваної енергії, зондувальні сигнали радіолокаторів із твердотільними передавачами мають бути набагато тривалішими. Однак із збільшенням тривалості зондувальних сигналів буде погіршуватися роздільна здатність радіолокатора. Задля її покращення в радіолокаторах, що використовують довгі зондувальні імпульси, застосовується внутрішньоімпульсна модуляція. Залежно від того, який з параметрів несівного коливання імпульсу піддається модуляції, зондувальний сигнал можливо представити у вигляді окремих частин, кожна з яких має свою частоту або фазу. Відгук цілі на такий сигнал можливо розділити на окремі частини та об’єднати їх у часі для отримання одного короткого імпульсу. Операція стискання сигналу відлуння виконується в спеціальних фільтрах. Процедура, що реалізується в таких фільтрах, називається стисканням імпульсу. Тепер стає можливим виконати розділення цілей, які знаходяться всередині області простору, розміри якої відповідають довгому випромінюваному сигналу. Таким чином, стискання імпульсів дає змогу об’єднати енергетичні переваги довгих імпульсів та переваги коротких імпульсів в просторовому розділенні. Через необхідність модуляції параметрів сигналу всередині імпульсу автоколивальні генераторні прилади не можуть використовуватися для реалізації описаного методу.
Шуми в приймачі завжди мають широку смугу частот та випадковий розподіл. При цьому спектральна щільність шуму є доволі малою порівняно із сигналом відлуння. Тому після фільтру стискання інтенсивність шуму значно зменшується. Таким чином, при використанні методу стискання імпульсу виявлення цілі може відбуватися навіть у випадках, коли амплітуда сигналу відлуння менша за рівень шумів. Очевидно, що у разі простого амплітудного детектування (наприклад, на діоді) такий сигнал був би втрачений.
В методі стискання імпульсу використовуються такі види модуляції (кодування) зондувального сигналу:
- частотна модуляція (FM), так звана, частотно-імпульсна модуляція
(FMOP), або ступінчата частотна модуляція:
- лінійна;
- нелінійна;,
- часо-частотне кодування сигналу (наприклад, код Костаса);
- фазовая модуляція (PM), так звана фазо-імпульсна модуляція (PMOP).
Метод стискання імпульсу забезпечує виділення сигналу від цілі, перекритого шумом. Прийняті сигнали обробляються в приймачі в фільтрі стискання. Фільтр стискання змінює відносні фази окремих частотних складових так, що в результаті утворюється короткий імпульс, який називають стисненим імпульсом. В результаті дальність дії радіолокатора стає більше очікуваної, розрахованої із застосуванням традиційного рівняння радіолокації.
Здатність приймача із стисненням імпульсу покращувати роздільну здатність з дальності порівняно із звичайним приймачем характеризується коефіцієнтом стискання імпульсів (англ. pulse compression ratio, PCR). Наприклад, значення коефіцієнту стискання 50:1 означає, що роздільна здатність радіолокатора у 50 разів менше порівняно із традиційним радіолокатором, який використовує зондувальний імпульс такої ж тривалості, що й нестиснений зондувальний імпульс радіолокатора із стисканням імпульсу. Коефіцієнт стискання імпульсу може бути виражений у вигляді відношення роздільної здатності, що відповідає немодульованому імпульсу тривалості τ, до роздільної здатності, що відповідає модульованому імпульсу тієї ж тривалості, але з шириною спектру B.
| PCR = | (c0 · τ /2) | = B · τ | (1) |
| (c0 / 2B) |
Таким чином, цей коефіцієнт описується базою сигналу (англ. time-bandwidth product) для модульованого імпульсу і дорівнює коефіцієнту підсилювання стисненого сигналу по аналогії із підсиленням у відношенні „сигнал – шум“ для немодульованого імпульсу. Із використанням коефіцієнту стискання імпульсу (PCR) вираз для роздільної здатності з дальності набуває вигляду:
| Rres = c0 · (τ / 2) = PCR · c0 /2 B | (2) |
Коефіцієнт стискання імпульсу чисельно дорівнює кількості окремих частин зондувального сигналу, які ще називають парціальними імпульсами, тобто кількості елементів в коді. Отже, роздільна здатність з дальності пропорційна тривалості одного парціального імпульсу або одного елемента коду. Максимальна дальність дії радіолокатора збільшується в кількість разів, яка дорівнює кореню четвертого ступеню з (PCR).
Слід зазначити, що мінімальна дальність дії не покращується у разі використання описаного методу. Випромінюванню підлягає імпульс повної тривалості і протягом усього часу його випромінювання передавач через антенний перемикач буде підключений до антени, а приймач закритий. Отже, Rmin змінюватися не буде.
Переваги
- Невисока імпульсна потужність
(дає змогу використовувати твердотільні підсилювачі) - Дальність дії вища
- Хороша роздільна здатність з дальності
- Краща перешкодозахищеність
- Складніш виявляється противником
Недоліки
- Складність формування
- Незадовільна мінімальна дальність дії
- Бічні пелюстки у часі
Таблиця 1. Переваги та недоліки методу стискання імпульсу
Стискання імпульсу для сигналу з лінійною частотною модуляцією
Розглянемо випадок, коли зондувальний сигнал являє собою імпульс із лінійною модуляцією несівної частоти. Використання сигналу такого типу має перевагою те, що схема обробки є порівняно простою. Однак, є й недолік, який полягає в тому, що в цьому випадку сигнал перешкоди для радіолокатора може бути згенерований досить просто за допомогою, так званих, свіперів (англ. Sweeper).
На Рисунку 3 зображена структурна схема, яка пояснює детальніше принцип будови фільтру стискання для сигналу з лінійною частотною модуляцією.

частотної складової
Рисунок 3. Структурна схема фільтру стискання (принцип функціонування пояснюється анімацією)

складової сигналу
частотної складової
Рисунок 3. Структурна схема фільтру стискання
складової сигналу
частотної складової
Рисунок 3. Структурна схема фільтру стискання (принцип функціонування пояснюється анімацією)
Фільтр стискання являє собою просту дисперсійну лінію затримки, значення затримки сигналу на виході якої пропорційне його частоті. У прикладі, представленому на Рисунку 3, низькочастотні складові спектру сигналу отримують більшу затримку, а високочастотні – меншу. На виході побудованого таким чином фільтру стискання кінець імпульсу наздоганяє його початок, завдяки чому формується вузький імпульс із більшою амплітудою.
Одним з прикладів практичної реалізації методу стискання імпульсу з лінійно-частотно модульованим сигналом є радіолокатор протиповітряної оборони AN/FPS-117 .
У теперішній час в радіолокаторах з лінійною частотною модуляцією зондувального сигналу застосовуються фільтри стискання двох типів:
- реалізовані в цифровому виді (після аналогово-цифрового перетворення));
- пристрої на поверхневих акустичних хвилях..
антени (по куту)
по часу (дальності)
Рисунок 4. Вигляд бічних пелюсток стисненого сигналу на осцилографі та на індикаторі В-типу

антени (по куту)
по часу (дальності)
Рисунок 4. Вигляд бічних пелюсток стисненого сигналу на осцилографі та на індикаторі В-типу
Бічні пелюстки у часі
Сигнал на виході фільтру стискання складається із стисненого імпульсу, супроводжуваного сплесками у прилеглих до нього часових інтервалах (тобто, на дальностях, відмінних від дальності стисненого імпульсу). Такі сплески називають бічними пелюстками по часу або по дальності. На Рисунку 4 показаний вигляд стисненого імпульсу для радіолокатора із ступінчастим зміненням частоти на осцилографі та на індикаторі типу “В”.
Для зменшення рівню бічних пелюсток до прийнятного рівня може бути застосована вагова обробка (амплітудне зважування) вихідного сигналу фільтру. Застосування вагової обробки тільки в тракті приймання дещо погіршує узгодженість фільтру, що призводить до певних втрат у відношенні „сигнал – шум“.
Рівні бічних пелюсток є важливими параметрами радіолокатора із стисканням імпульсу. Застосування вагової обробки може знизити рівень бічних пелюсток у часі до порядку −30 дБ.
Стискання імпульсу для сигналу з нелінійною частотною модуляцією
Використання сигналів з нелінійною частотною модуляцією має декілька явних переваг. Обробка такого сигналу не потребує амплітудного зважування для придушення бічних пелюсток у часі, оскільки параметри частотної модуляції підбираються таким чином, щоби забезпечити потрібний амплітудний спектр. Тобто, в даному випадку, потрібний рівень бічних пелюсток досягається без застосування вагової обробки.
З цієї причини при використанні сигналу із нелінійною частотною модуляцією узгодженість фільтру суміщається з низьким рівнем бічних пелюсток. Отже, виключаються втрати у відношенні „сигнал – шум“, спричинені ваговою обробкою, яка призводить до розузгодженості фільтру.
Симетричний сигнал має першу половину, протягом якої його частота зростає (або убуває) з часом, і другу половину, протягом якої частота сигналу, навпаки, убуває (або зростає). Несиметричний сигнал отримують у разі використання тільки однієї половини симетричного сигналу (Рисунки 5, 7).
Недоліками сигналів з нелінійною частотною модуляцією є:
- збільшена складність будови системи;
- необхідність окремої схеми для формування кожного типу імпульсу з метою досягнення потрібного рівня бічних пелюсток.

Рисунок 6. Несиметричний сигнал (на виході формувача зондувального сигналу)


нелінійна ЧМ
Рисунок 5. Симетричний сигнал із нелінійною частотною модуляцією

нелінійна ЧМ
Рисунок 5. Симетричний сигнал із нелінійною частотною модуляцією

Рисунок 7. Несиметричний сигнал

Стискання імпульсу з фазовою модуляцією


{kind=link}
{kind=link}
{kind=link}
{kind=link}
Сигнали з фазовою модуляцією відрізняються від сигналів з частотною модуляцією тим, що весь сигнал розділяється на декілька окремих коротких парціальних імпульсів. Як правило, кожен парціальний імпульс відповідає осередку дальності. Парціальні імпульси мають однакову тривалість, але випромінюються кожен зі своєю фазою. Фази парціальних імпульсів визначаються кодом фази. Найбільш широко використовується спосіб кодування фази двійкове кодування. В цьому випадку говорять про сигнал з фазовою маніпуляцією.
Двійковий код складається з послідовності „+1“ та „-1“. Відповідно до цього коду фази парціальних імпульсів приймають значення 0º та 180º, як показано в прикладі на Рисунку 8. Оскільки несівна частота не завжди може бути кратною оберненій тривалості парціального імпульсу, кодований сигнал є переривчастим в точках змінення фази на протилежну.
| Довжина коду n | Елементи коду | Рівень бічних пелюсток, dB |
| 2 | +- | -6.0 |
| 3 | ++- | -9.5 |
| 4 | ++-+ , +++- | -12.0 |
| 5 | +++-+ | -14.0 |
| 7 | +++--+- | -16.9 |
| 11 | +++---+--+- | -20.8 |
| 13 | +++++--++-+-+ | -22.3 |
Таблиця 2: коди Баркера
Вибір закону чергування фаз парціальних імпульсів (коду фази) є критично важливим і цей закон не може бути випадковим. Такий код має забезпечувати мінімальний рівень бічних пелюсток, які виникають після стискання імпульсу. Оптимальними в цьому смислі є коди Баркера, що дають низький рівень бічних пелюсток, які при цьому мають однаковий рівень. Існує лише зовсім невелика кількість оптимальних кодів Баркера. Вони наведені в таблиці нижче. Під час пошуку оптимальних кодів було проведено моделювання кодів Баркера довжиною до 6000 елементів, однак максимальним розміром коду серед них є 13. Таким чином, максимальний коефіцієнт стискання у разі використання кодів Баркера дорівнює 13. При цьому рівень бічних пелюсток складає -22,3 дБ.