Monopulzní anténa

Obrázek 1: Princip konstrukce monoimpulsní antény: součtový a rozdílový kanál


Obrázek 2: Pohled na monoimpulsní anténní soustavu v řezu

Monopulzní anténa
Koncepce monopulsní antény kombinuje antény, které jsou konstruovány jako anténní pole a mají zvláštní způsob napájení, kdy jednotlivé anténní prvky nejsou vždy napájeny ve fázi. Pro různé úlohy lze generovat různé kombinace energie přijaté jednotlivými anténami ve formě součtů a rozdílů.
- V primárním radaru
AN/FPS-117
- během okamžiku vysílání: všechny anténní prvky jsou napájeny fázově a vyzařovací diagram je výsledkem jejich součtu.
- během přijímacího okamžiku: se používají pouze určité anténní prvky; sčítání/odčítání signálů na jejich výstupech tvoří vlastní kanály příjmu a zpracování.
- V sekundárním radaru
IFF/SIF Siemens 1990
- skupina impulzů je vysílána přes sumační kanál a
- jeden impuls v rozdílovém kanálu.
Výše uvedené příklady ukazují, že monoimpulsní anténa není samostatným typem antény. Například radarový dotazovač Siemens 1990 používá skupinovou anténu složenou z logoperiodických antén a radar AN/FPS-117 používá fázovou anténní soustavu.
Koncept Monopulse

Obrázek 3: Vysvětlení úhlového odhadu polohy cíle metodou maxima (používanou ve starších radarech, které nepoužívaly metodu jednoimpulsního určování směru).

Obrázek 3: Vysvětlení úhlového odhadu polohy cíle metodou maxima (používanou ve starších radarech, které nepoužívaly metodu jednoimpulsního určování směru).
Monopulzní radary se poprvé objevily ve sledovacích systémech. Od konce 70. let 20. století bylo monoimpulsní ložisko přizpůsobeno primárním a sekundárním průzkumným radarovým systémům a nyní se široce používá po celém světě.
Cíl je radarem sledován od okamžiku, kdy dopadne na hlavní anténní svazek, nebo od okamžiku, kdy začne být ozařován svazkem vysílací antény radaru. Průzkumný radar vždy odhaduje úhlovou polohu cíle s chybou, protože jeho činnost je založena na předpokladu, že cíl se v okamžiku, kdy radar přijímá odražený signál, nachází v ose hlavního anténního svazku. Tato chyba má velikost úměrnou šířce hlavního paprsku antény.
Přibližnou metodou určení úhlové polohy cíle je otáčení antény v blízkosti směru cíle a stanovení její úhlové polohy, v níž je amplituda echosignálu maximální. Princip této metody je znázorněn na obrázku 3.
Přesnost tohoto odhadu úhlové polohy bude bohužel ovlivněna chybami způsobenými tepelným šumem a chybami způsobenými tzv. „cílovým šumem“ (scintilací). Scintilace cíle je způsobena změnou efektivního povrchu cíle v průběhu doby, kdy radar ozařuje cíl. To vede ke zkreslení obálky přijatého paketu echa.
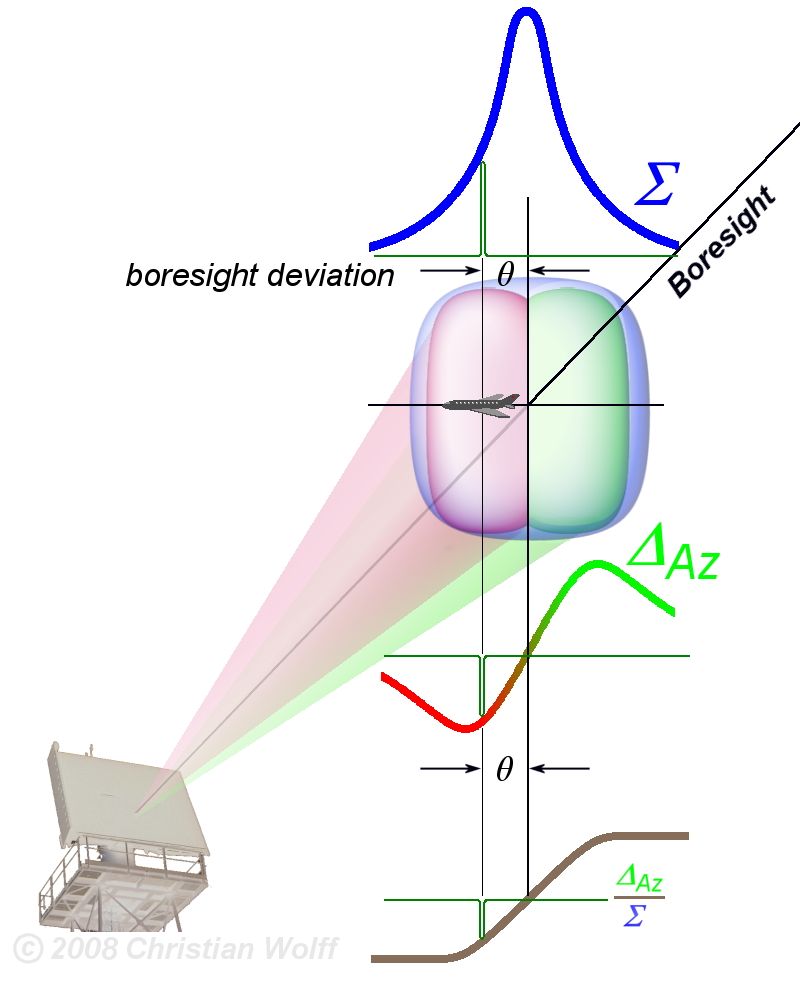
Obrázek 4: Princip konstrukce monopulsního systému

Jeden odražený signál stačí!
Monopulsní metoda poskytuje lepší výsledky přesnosti měření úhlové polohy cíle než metoda maximální, jejíž princip je znázorněn na obrázku 3. Tato metoda může pracovat s nižší opakovací frekvencí pulzů, což je samo o sobě výhodou. Monopulzní systémy mají obvykle lepší zpracování, které poskytuje lépe kódované informace o cíli. K získání informace o úhlové poloze stačí jediný impuls odražený od cíle (odtud název monopuls).
Prvky lineárního anténního pole jsou rozděleny na dvě poloviny. Tyto dvě samostatné anténní mřížky jsou uspořádány symetricky kolem osy antény. Tato osa se často označuje jako „boresight“. V režimu vyzařování (Tx) jsou obě anténní mřížky napájeny ve fázi. Odpovídající směrový diagram se nazývá součtový nebo Σ-diagram a je znázorněn modře na obrázku 4 a v grafu v horní části obrázku 4 znázorněném modře.
V přijímacím režimu (Rx) jsou oproti normálnímu režimu možné další způsoby příjmu signálu. Je možné vypočítat součet Σ signálů přijímaných jednotlivými anténními dílčími mřížkami (analogicky k vytvoření celkového diagramu v režimu vyzařování) a rozdíl ΔAz, jehož výsledkem je tzv. azimutální rozdílový diagram. Jednotlivé části takového vzoru jsou na obrázku znázorněny červeně a zeleně. Oba signály (celkový a rozdílový) se porovnají a rozdíl se použije k přesnějšímu odhadu úhlové polohy cíle.
Úhel mezi osou antény (ekvivalentním směrem) a cílem se také nazývá úhel mimo záběr OBA-value (Off-Boresight Angle).
U třísouřadnicových radarů se jako třetí souřadnice měří také elevační úhel. Výše uvedený postup se tedy použije dvakrát. Za tímto účelem je anténa navíc rozdělena na dvě části ve svislém směru. Výsledný rozdílový kanál ΔEl se nazývá úhlový rozdílový kanál polohy.
II |
I |
III |
IV |
II |
I |
III |
IV |
Obrázek 5. Rozdělení monopulsní antény na čtyři kvadranty
Monopulsní anténa se nyní zdá být rozdělena na čtyři části, tzv. kvadranty (obrázek 5). Signály přijaté z těchto kvadrantů umožňují vytvořit následující signály:
- celkem - signál Σ ( I + II + III + IV )
- rozdíl azimutů ΔAz ( I + IV ) - ( II + III )
- rozdíl elevačním úhlů ΔEl ( I + II ) - ( III + IV )
Pro úplný popis je třeba zmínit pomocný signál Ω, ačkoli s monoimpulsní metodou přímo nesouvisí. Jedná se o signál získaný z kanálu pro potlačení bočních laloků. Takový kanál má vždy vlastní malou anténu s širokým vyzařovacím diagramem. Lze jej použít k odhadu rušení.
Každý z těchto signálů vyžaduje vlastní přijímací kanál. V moderním tříosém radaru jsou tedy nejméně čtyři paralelní přijímací kanály.
Pokud jsou primárními zářiči monoimpulsní antény rohové antény, lze tvorbu přijímacích kanálů a zpracování přijatých signálů provádět pomocí monoimpulsních přepínačů postavených na vlnovodných trojúhelnících.