Определение координат цели в бистатическом радиолокаторе
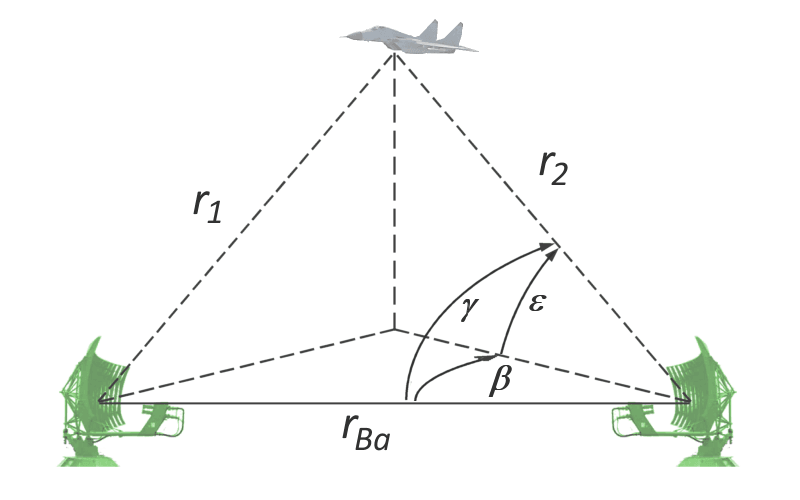
Рисунок 1. Определение координат цели в бистатическом радиолокаторе

Определение координат цели в бистатическом радиолокаторе
В бистатической разнесенной радиолокационной системе (Рисунок 1) излученный сигнал достигает приемника по двум путям: прямому rBa (антенна активного радиолокатора – антенна пассивного приемника) и после отражения от цели (путь r1 + r2). Таким образом, в пассивном приемнике может быть измерено полное расстояние r1 + r2, а также азимут β и угол места ε прихода рассеянного целью сигнала.
Для рассчета дальности необходима информация о времени излучения активным радиолокатором зондирующего сигнала. Это время можно рассчитать, поскольку излученный сигнал принимается также по прямому пути, а расстояние rBa между излучающим и принимающим пунктами известно.
Рассчитанное на основании измерений расстояние rΣ определяет положение цели на поверхности сфероида, фокусами которого являются точки расположения передающей и приемной антенн. Точкой нахождения цели является точка пересечения этого сфероида и прямой, соответствующей направлению прихода рассеянной волны в точку приема. Таким образом, расстояние от точки приема до цели рассчитывается на основании закона косинуса и измеренного расстояния rΣ:
.print.png)
.png)
(1)
Система уравнений (1) с двумя неизвестными r1 и r2 может быть преобразована в уравнение
.print.png)
.png)
(2)
Величина угла γ рассчитывается по измеренным значениям углов β и ε на основе тригонометрического соотношения между этими тремя углами:
.print.png)
(3)
Для радиолокатора, измеряющего только в двух измерениях, γ = β.

Рисунок 2. Принцип измерения пассивного радара Klein Heidelberg Parasit.

Одно из первых применений этого принципа произошло во время Второй мировой войны в пассивном радаре Klein Heidelberg Parasit. Этот радар использовал излучение передатчиков британской системы Chain Home . Различные передающие башни Chain Home работали по определенному расписанию. Таким образом, для выбора одного из передатчиков можно было использовать таймер и схему стробирования.
Измеряя время задержки между непосредственно принятым и отраженным сигналом, определялась разность расстояний. Из-за неоднозначности системы уравнений с двумя уравнениями и тремя неизвестными время задержки дает все возможные точки, которые затем образуют эллипс с передатчиком и приемником в фокальных точках.
Однако приемную антенну можно повернуть и с помощью ее диаграммы направленности определить угол β в качестве третьей переменной. Таким образом, результат измерения становится однозначным. Точность измерений можно повысить, используя для пеленгации первый ноль диаграммы направленности антенны.