Coordinate determination with bistatic radar
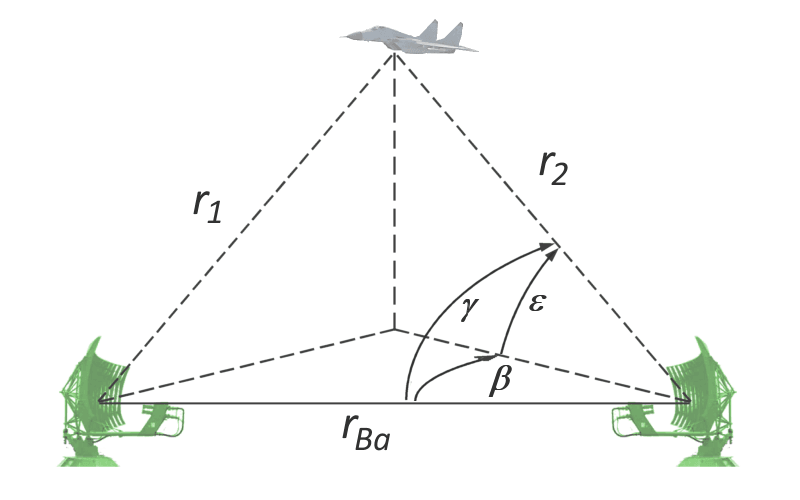
Figure 1: Coordinate determination with bistatic radar

Coordinate determination with bistatic radar
The transmitted pulse reaches the receiver in two ways: on the direct route and after reflection at the target. The receiving radar measures the total distance rΣ = r1 + r2, and the azimuth angle β and the elevation angle ε of the backscattered signal.
In order to calculate the distance, the radar must know the time at which the transmitting radar emits active. This time reference can be calculated because the transmitted signal is received on a direct path too, and the distance rBa between these two radars is known.
The distance rΣ determines the position of the target on the surface of a spheroid, whose foci are the transmitting and the receiving antenna. The target is at the intersection of the surface of this spheroid with the straight line that characterizes the direction from which the reflected signal arrives. The distance to the aim of the receiver antenna r2 can be determined using the cosine law and the measured total distance rΣ:
.print.png)
.png)
(1)
This system of equations with the two unknown quantities r1 and r2 can be transformed to the following equation:
.print.png)
.png)
(2)
The size of the angle γ is determined from the measured angles β and ε on the basis of the trigonometric relationship between these three angles:
.print.png)
(3)

Figure 2: Measurement principle of the passive radar Klein Heidelberg Parasit.

One of the first uses of this principle occurred during World War II with the Klein Heidelberg Parasit passive radar. This radar used the emissions of the transmitters of the British Chain Home . The various transmitting towers of the Chain Home operated on a specific schedule. Thus, a timer and gate circuit could select one of the transmitters.
The difference between direct and reflected signals is the measure for the distance. Because of the ambiguity in the system of equations with two equations and three unknowns (r1,r2, and γ), the delay time gives all possible locations, which form an ellipse with the transmitter and receiver at the foci.
However, the receiving antenna could rotate, and its antenna pattern could determine the angle β as the third variable. Thus, the measurement result became unambiguous. The accuracy of the measurement could be improved by using the first zero of the horizontal antenna pattern.