Určení souřadnic cíle v bistatickém radaru
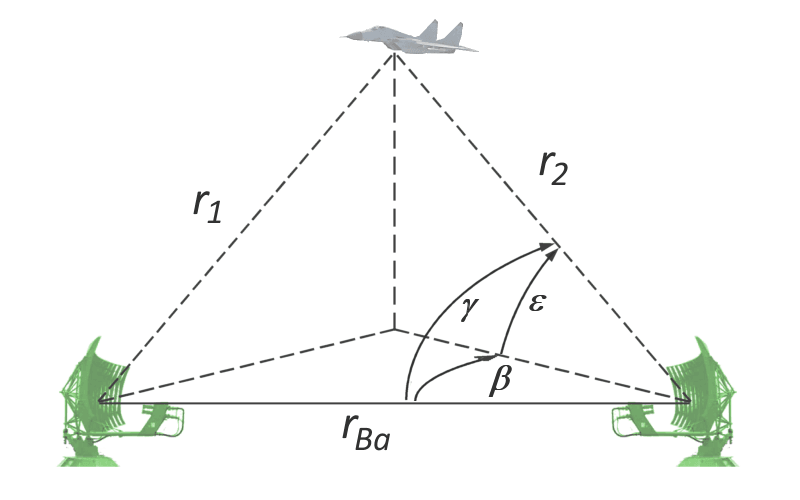
Obrázek 1: Určení souřadnic cíle v bistatickém radaru

Určení souřadnic cíle v bistatickém radaru
V bistatickém rozptýleném radarovém systému (obrázek 1) se vysílaný signál dostává do přijímače dvěma cestami: přímou cestou rBa (aktivní radarová anténa - pasivní anténa přijímače) a po odrazu od cíle (cesta r1 + r2). V pasivním přijímači lze tedy měřit celkovou vzdálenost r1 + r2, azimut β a elevační úhel ε signálu rozptýleného cílem.
K výpočtu dosahu je zapotřebí informace o době, kdy aktivní radar vysílá sondážní signál. Tuto dobu lze vypočítat, protože vyzařovaný signál je přijímán i po přímé dráze a je známa vzdálenost rBa mezi vysílacím a přijímacím místem.
Vzdálenost rΣ vypočtená z měření určuje polohu cíle na povrchu sféroidu, jehož ohnisky jsou vysílací a přijímací antény. Bodem polohy cíle je průsečík tohoto sféroidu a přímky odpovídající směru příchodu rozptýlené vlny do přijímacího místa. Vzdálenost od přijímacího bodu k cíli se tedy vypočítá na základě kosinového zákona a naměřené vzdálenosti rΣ:
.print.png)
.png)
(1)
Soustavu rovnic (1) se dvěma neznámými r1 a r2 lze transformovat do rovnice (2).
.print.png)
.png)
(2)
Hodnota úhlu γ se vypočítá z naměřených hodnot úhlů β a ε na základě trigonometrického vztahu mezi těmito třemi úhly:
.print.png)
(3)
Pro radar měřící pouze ve dvou rozměrech platí γ = β.

Obrázek 2: Princip měření pasivního radaru Klein Heidelberg Parasit.

K jedné z prvních aplikací tohoto principu došlo během druhé světové války v pasivním radaru Klein Heidelberg Parasit. Tento radar využíval záření vysílačů britského systému Chain Home . Různé vysílací věže systému Chain Home pracovaly podle určitého rozvrhu. K výběru jednoho z vysílačů tak bylo možné použít časovač a schéma brány.
Měřením doby zpoždění mezi přímo přijímaným a odraženým signálem se určil rozdíl vzdáleností. Vzhledem k nejednoznačnosti soustavy rovnic se dvěma rovnicemi a třemi neznámými udává doba zpoždění všechny možné body, které pak tvoří elipsu s vysílačem a přijímačem v ohniskových bodech.
Přijímací anténu lze otáčet a její vyzařovací diagram lze použít k určení úhlu β jako třetí proměnné. Tímto způsobem se výsledek měření stává jednoznačným. Přesnost měření lze zlepšit použitím první nuly anténního diagramu pro určení směru.