Імпульсний радіолокатор

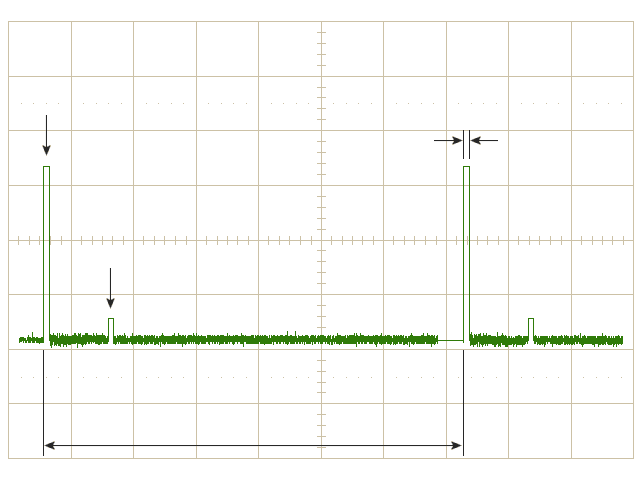
Рисунок 1. Вимірювання часу запізнення в радіолокаторі

відбитий сигнал
Рисунок 1. Вимірювання часу запізнення в радіолокаторі


Імпульсний радіолокатор
відбитий сигнал
Рисунок 2. Параметри імпульсів в радіолокаторі

відбитий сигнал
Рисунок 2. Параметри імпульсів в радіолокаторі
Імпульсний радіолокатор — це радіолокаційний пристрій, який випромінює короткі потужні імпульси, а між ними (під час так званого інтервалу спокою) приймає сигнали відлуння. На відміну від радіолокатора безперервного випромінювання, передавач імпульсного радіолокатора вимкнений до моменту закінчення вимірювання. Характерною особливістю цього методу є те, що зондувальні імпульси мають дуже малу тривалість (зазвичай їхня тривалість становить τ ≈ 0,1 … 1 мкс). Між зондувальними імпульсами є дуже тривалі паузи Τ >> τ, які називають інтервалами приймання (зазвичай Т ≈ 1 мс), як показано на Рисунку 2. Дальності до об’єктів, що відбивають зондувальні сигнали, визначають шляхом вимірювання часу запізнення сигналу відлуння, як показано на Рисунку 1 (для стаціонарних радіолокаторів), або порівнянням характерних змін допплерівського спектру сигналу відлуння із значеннями для заданих дальностей, які зберігаються в базі даних (для радіолокаторів, розташованих на платформах, що швидко рухаються). Імпульсні радіолокатори, як правило, розробляються для великих дальностей цілей і випромінюють порівняно високу імпульсну потужність.
Важливою відмінною особливістю порівняно з іншими методами радіолокації є необхідність синхронізації у часі всіх процесів, що відбуваються в імпульсному радіолокаторі. Передній фронт випромінюваного імпульсу визначає початок відліку для вимірювання часу запізнювання сигналу відлуння. Кінцем інтервалу запізнення є момент досягнення наростаючим фронтом сигналу відлуння своєї вершини. Затримки, що виникають під час обробки сигналу, є систематичними і мають враховуватися під час розрахунку дальності цілі. Випадкові відхилення часу запізнення впливають на точність імпульсного радіолокатора.
Зондувальний сигнал
Форма зондувального сигналу може бути математично описана таким виразом:
| s(t) = A(t)· sin[2πf(t)·t + φ(t)] | (1) |
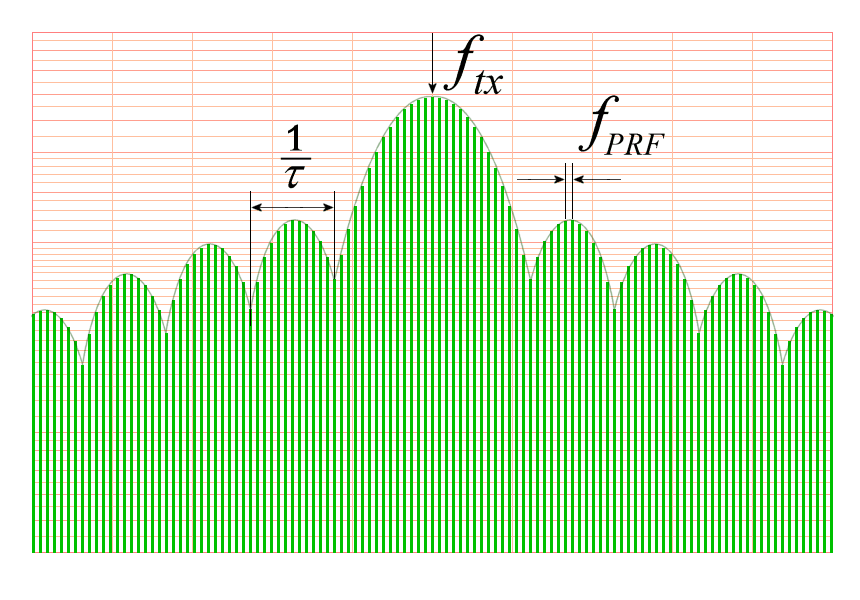
Рисунок 3. Частотний спектр послідовності прямокутних імпульсів поблизу несівної частоти ftx

Функція A(t) описує зміни амплітуди залежно від часу t, наприклад, амплітудну модуляцію. В найпростішому випадку передавач вмикається на короткий час (тривалістю τ), а решту часу залишається у «вимкненому» стані. Тому A(t) = 1 під час випромінювання імпульсу та A(t) = 0 решту часу. Залежність від часу визначається частотою повторення імпульсів та коефіцієнтом заповнення. Оскільки радіолокаційні відгуки піддаються різноманітним та таким, що не можуть бути точно враховані, втратам, дійсна амплітудна модуляція не несе особливого смислу, за виключенням функції перемикання (увімкнення / вимкнення). Іншими словами, амплітуда сигналу відлуння не є інформативним параметром. Важливим є лише факт перевищення нею певного порогового значення. Обвідна частотного спектру періодичної послідовності імпульсів описується функцією виду (sin x)/x (Рисунок 3), яку іноді називають арочним синусом. Основна частина випромінюваної потужності (зверніть увагу на логарифмічний масштаб осі ординат) знаходиться в інтервалі частот BHF = 2/τ поблизу несівної частоти сигналу ftx.
Частота повторення імпульсів fPRF, тривалість зондувального імпульсу τ та тривалість інтервалу приймання (Τ − τ) визначають показники якості радіолокатора, наприклад, мінімальну дальність дії (зондувальний імпульс має повністю полишити антену) і максимальна однозначно вимірювана дальність (сигнал відлуння має бути прийнятий до моменту випромінювання наступного зондувального імпульсу). Тривалість зондувального імпульсу τ в основному визначає роздільну здатність з дальності ΔR імпульсного радіолокатора, яка описується виразом:
| ΔR = 0,5·τ·c | (2) |
Чим коротший зондувальний сигнал, тим ближче один до одного можуть знаходитися два відбивачі, які, тим не менш, будуть виявлятися як два окремих об’єкти, а не як один протяжний об’єкт. Ширина спектру BHF зондувального сигналу збільшується із зменшенням тривалості імпульсу:
| BHF = τ−1 | (3) |
У випадку простої модуляції імпульсу зменшення його тривалості обмежує максимальну дальність дії радіолокатора. В цих умовах енергія зондувального сигналу Ep може бути збільшена тільки за рахунок імпульсної потужності PS при заданій роздільній здатності з дальності. Для максимальної дальності визначальним фактором є енергія імпульсу, а не імпульсна потужність:
| Ep = Ps· τ = Pav· Τ = | Pav | де | Ep – енергія імпульсу; PS – випромінювана імпульсна потужність; Pav – середня потужність (за період зондування). |
(4) |
| fPRF |
Значне покращення в такій ситуації може бути досягнуто за рахунок внутрішньої модуляції зондувального імпульсу (внутрішньоімпульсної модуляції). Співвідношення між тривалістю зондувального імпульсу та тривалістю імпульсу на виході приймача визначається стисненням імпульсів в приймачі. За рахунок стиснення імпульсів вимірювання координат кількох відбивачів, в тому числі визначення дальності до кожного з них, можливо виконати протягом тривалості зондувального імпульсу.
Функція φ(t) у виразі (1) описує фазовий зсув всього сигналу. Радіолокатор, в якому початкова фаза зондувального сигналу відома або може бути обчислена, називають повністю когерентним. Якщо відомо поточне значення фази, але початкове її значення не відомо, то радіолокатор відносять до одного з видів псевдокогерентних радіолокаторів. Якщо початкова фаза повністю невідома (змінюється хаотично), радіолокатор є некогерентним. Функція φ(t) набуває великого значення для випадків внутрішньоімпульсної модуляції з кодуванням (маніпуляцією) фази.
Сигнал відлуння (відбитий сигнал)
Зазвичай припускають, що тривалість зондувального імпульсу та тривалість відбитого сигналу відлуння рівні. Тому при розрахунках, де фігурують випромінювана потужність та потужність прийнятого сигналу (що має місце у фундаментальному рівнянні радіолокації), тривалість цих сигналів можливо опустити.
Під час відбиття зондувального сигналу від цілі можуть відбуватися такі зміни:
- B спектрі:
- можуть виникати додаткові гармоніки на несівній частоті;
- на несівну частоту можуть накладатися одна або декілька допплерівських частот.
- Може змінюватися напрямок поляризації.
- Тривалість сигналу відлуння не є постійною та може суттєво збільшуватися за рахунок інтерференції сигналів, відбитих близько розташованими елементами цілі (а отже такими, що мають відмінності у часі запізнення).
У підсумку сигнал відлуння піддається такий великій кількості впливів, що його форма розглядається як невідома. Проте, оптимальні узгоджені приймачі або узгоджені фільтри створюються шляхом використання декількох паралельних каналів, що враховують можливі деформації сигналу. Ці пристрої забезпечують максимально можливе відношення «сигнал – (шум + перешкода)». З їх виходу сигнал надходить на подальшу обробку. При цьому запам’ятовується момент (положення на осі часу) максимального перевищення сигналом шуму як важливий параметр, що ідентифікує цей сигнал серед сигналів, прийнятих від інших цілей.
В загальному випадку ширина смуги приймача вибирається якомога вужчою для зниження рівня прийманих небажаних шумових коливань та перешкод. У випадку використання простого радіоімпульсу ширина смуги приймача визначається співвідношенням BHF = 1/τ. Вплив шумів може бути також зменшений за рахунок накопичення імпульсів у приймачі. Це означає сумування прийнятих імпульсів в кількох періодах зондування. Припускається, що протягом інтервалу накопичення (декілька періодів зондування) ціль лишається нерухомою, тобто затримка між імпульсами буде постійною та в кожному черговому періоді сигнал відлуння буде знаходитися на одному й тому ж місці на осі часу. Шум має випадковий розподіл амплітуд та додаватися буде з випадковими фазами. Тому результат його сумування завжди буде меншим суми накопичених сигналів відлуння. Таким чином, за рахунок використання накопичення покращується відношення «сигнал – шум»..
Будова, структурна схема
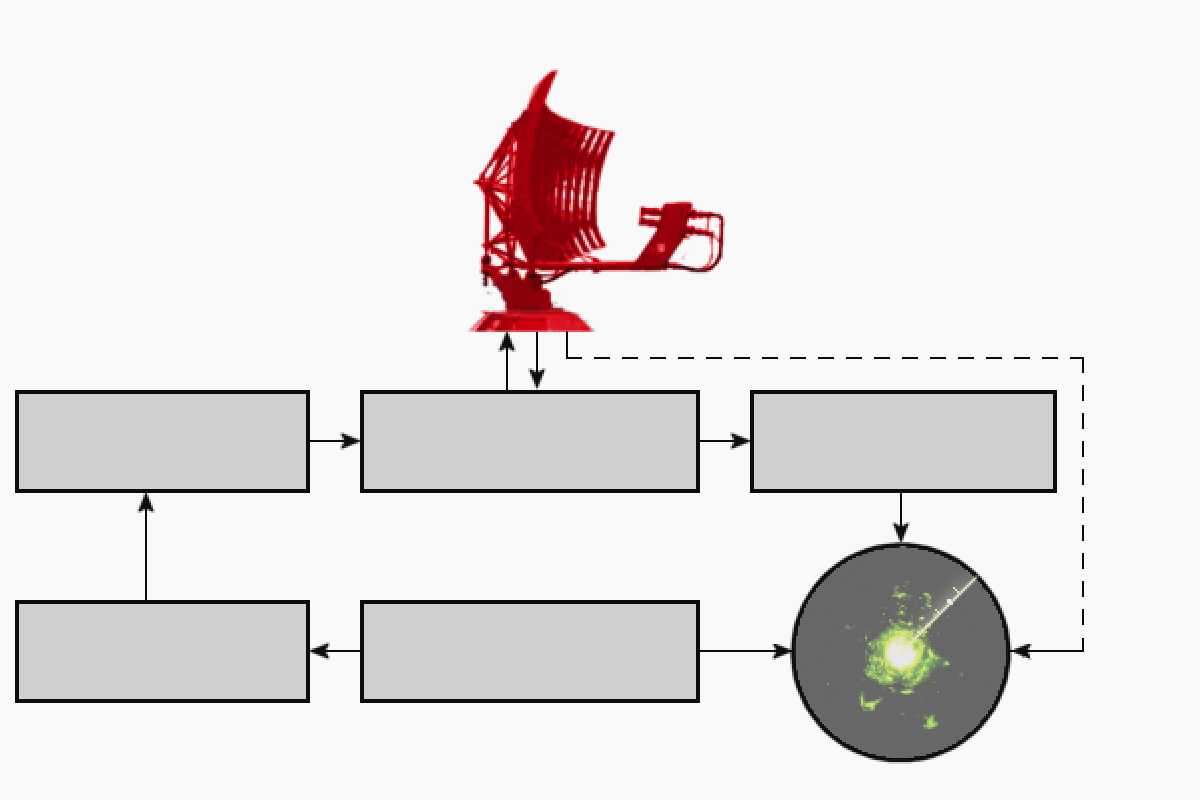
Рисунок 4. Структурна схема однопозиційного імпульсного радіолокатора

{kind=link}
Конструкція імпульсного радіолокатора залежить від того, чи знаходяться передавач та приймач в одному місці (однопозиційний або суміщений радіолокатор), чи обидва ці компоненти розміщені у різних місцях (рознесений або багатопозиційний радіолокатор).
Однопозиційний імпульсний радіолокатор, на додаток до компактної конструкції, має перевагою те, що важливі для імпульсного радіолокатора пристрої синхронізації можуть бути зосереджені в центральному блоці синхронізації. Таким чином, внутрішні затримки на перемикаючих пристроях можуть бути малими. Складна та коштовна антена радіолокатора за рахунок використання антенного перемикача може використовуватися як для випромінювання, так і для приймання сигналів.
Недоліком є необхідність відключення високочутливого приймача за допомогою антенного перемикача на час випромінювання зондувального сигналу для уникнення виходу його з ладу під впливом великої потужності передавача. Протягом цього часу приймання сигналів відлуння неможливе.
Опис блоків на блок-схемі:
В багатопозиційному імпульсному радіолокаторі приймач має власну антену, що знаходиться на віддалені від передавача. Цим визначається перевага, яка полягає у відсутності необхідності складних заходів захисту приймача від високої потужності передавача. В найпростішому випадку мережа будується шляхом доповнення існуючого однопозиційного радіолокатора новими приймальними пунктами. Приклад: метеорологічний радіолокатор Poldirad в Оберпфаффенгофене (Oberpfaffenhofen), Німеччина (недалеко від Мюнхену). Приймальні антени не є гостронаправленими: вони мають забезпечувати приймання з кількох напрямків одночасно. Недоліком тут є дуже складна синхронізація. Одночасно з сигналами відлуння приймач має приймати і прямий сигнал від передавача. По цьому сигналу та відомій відстані до передавача може бути сформовано сигнал синхронізації. Основним застосуванням багатопозиційної схеми у військовій справі є загоризонтні радіолокатори.
Пасивні радіолокатори є різновидом багатопозиційних радіолокаторів. В них використовуються різноманітні високочастотні випромінення (радіо- або телемовлення, імпульсні радіолокатори). В пасивних радіолокаторах положення цілі визначається на основі різниці між часом надходження прямого сигналу та додатковим часом запізнення відбитого сигналу. Неоднозначність вимірювання усувається шляхом безпосереднього визначення напрямку на ціль за її побічним випроміненням або шляхом синхронізації двох пасивних радіолокаторів, розташованих в різних місцях.
Застосування
Імпульсні радіолокатори розробляються, в основному, для великих відстаней до цілей. Основним їх застосуванням дотепер залишається воєнна сфера. Іншими застосуваннями є управління повітряним рухом, спостереження за погодою (особливо, опадами), а також супутникове дистанційне зондування Землі.