Radar cu impulsuri

Ilustrație 1: Principiul sondajului cu impulsuri.

Ilustrație 1: Principiul sondajului cu impulsuri.


Radar cu impulsuri
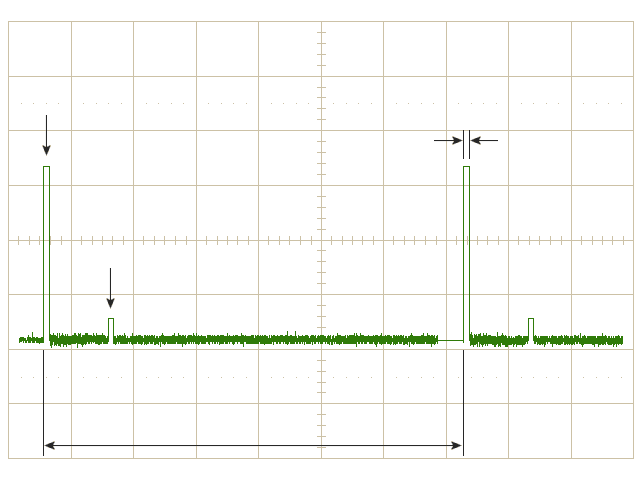
Ilustrație 2: Relația dintre impulsuri și ecouri.

Un radar cu impulsuri este un dispozitiv de teledetecție care emite impulsuri și apoi intră în modul de ascultare a ecoului returnat de ținte din mediul înconjurător. Spre deosebire de radarul cu unde continue, transmițătorul este oprit în timpul ascultării. Această metodă de ecolocație se caracterizează prin transmiterea unor impulsuri foarte scurte cu durata τ de ordinul ≈ 0,1 până la 1 µs și un timp de ascultare mult mai lung Τ (>> τ) de ordinul a 1 ms, după cum se demonstrează în figura 2. Distanța până la țintă este determinată de timpul de întoarcere al semnalului (pentru un radar staționar) sau prin compararea spectrului Doppler dintre semnalul transmis și ecou în funcție de distanță (pentru un radar mobil). Radarele cu impulsuri sunt concepute în primul rând pentru detectarea pe distanțe lungi și, prin urmare, emit impulsuri foarte puternice.
O diferență importantă față de alte tipuri de radare este nevoia de sincronizare eficientă a fiecărui proces din circuitul radar. Frontul de atac al impulsului este timpul de referință pentru întregul proces. Aceasta se încheie cu recepția frontului de undă al ecoului. Orice întârziere sistematică în circuitele interne ale procesorului trebuie să fie luată în considerare pentru a obține timpul real de călătorie dus-întors și, prin urmare, distanța până la țintă. Orice variație aleatorie a timpului care poate fi adăugată va influența în mod direct precizia radarului.
Semnal transmis
Forma de undă transmisă poate fi descrisă matematic astfel:
| s(t) = A(t)· sin[2πf(t)·t + φ(t)] | (1) |

Ilustrație 3: Descompunerea spectrului de frecvență asociat unei unde pătrate la frecvența purtătoare ftx

Ilustrație 3: Descompunerea spectrului de frecvență asociat unei unde pătrate la frecvența purtătoare ftx
Funcția A(t) reprezintă variația amplitudinii impulsului în funcție de timp, adică modularea acestuia. În cel mai simplu caz, transmițătorul transmite pentru perioade scurte de timp τ și este oprit în restul timpului. A(t) este astfel egal cu 1 în timpul lui τ și zero în caz contrar. Funcția de timp este determinată de rata de repetiție a impulsurilor și de ciclul de funcționare. Deoarece ecourile care se întorc la radar sunt supuse la diferite pierderi, o modulație de amplitudine diferită a semnalului în acest caz nu oferă nici un avantaj pentru decodarea acestuia în receptor. Cu toate acestea, o astfel de undă pătrată poate fi descompusă într-un spectru de frecvență egal cu o funcție (sin x)/x. Cea mai mare parte a puterii transmise (a se observa că scara este logaritmică în figura 3) se află în regiunea de frecvență BHF = 2/τ în jurul frecvenței purtătoare ftx.
Frecvenţa de repetiţie a impulsurilor (FRI sau în engleză: PRF), lungimea impulsului τ și timpul de ascultare (Τ − τ) influențează performanțele radarului: distanța minimă de descoperire și distanța maximă univocă. Lungimea impulsului τ afectează, de asemenea, celula de rezoluție în distanţă ΔR a radarului:
| ΔR = 0.5·τ·c | (2) |
Cu cât lungimea impulsului este mai scurtă, cu atât mai bine poate radarul să rezolve două ținte situate una în spatele celeilalte, în loc să obțină un singur obiect mare. Cu toate acestea, lățimea de bandă a undei purtătoare BHF crește odată cu scăderea lățimii impulsului:
| BHF = τ−1 | (3) |
Scurtarea impulsului limitează, de asemenea, raza maximă de acțiune în cazul simplu. Acest lucru se datorează faptului că energia Ep conținută în impuls depinde de lungimea acestuia, iar cu cât impulsul este mai scurt, cu atât energia este mai mică la o anumită distanță față de radar și cu atât este mai puțin probabil ca energia măsurabilă să fie returnată la radar.
Pentru o rază maximă de acțiune, energia este, prin urmare, factorul crucial, nu puterea de transmisie:
| Ep = Ps· τ = Pmoj· Τ = | Pmoj | cu | Ep = energia impulsului PS = puterea transmițătorului Pmoj = puterea medie |
(4) |
| fFRI |
Îmbunătățiri semnificative pot fi aduse prin modularea anvelopei impulsului (compresie de impulsuri), unde un impuls lung este comprimat într-unul mai scurt. Relația dintre durata impulsului transmis și cea a impulsului returnat este rezolvată prin decompresie la receptor. Poziția individuală a țintelor sondate de impulsul comprimat poate fi, de asemenea, obținută cu ajutorul timpului de călătorie dus-întors.
Funcția φ(t) din ecuația (1) exprimă diferența de fază în timp a semnalului. Faza inițială emisă de transmițător este întotdeauna aceeași, iar evoluția sa în timp va fi extrapolată cu ușurință în cazul unui radar coerent. În cazul unui radar pseudocoerent, faza inițială este aleatorie și trebuie înregistrată pentru a fi comparată cu ecoul. În cazul în care nu se observă acest lucru, se spune că radarul este „incoerent“. Acest lucru este important pentru modulația intra-impuls a impulsurilor comprimate și pentru analiza deplasării Doppler.
Echo
Forma de undă a ecoului este influențată de numeroase fenomene care nu permit cunoașterea acesteia înainte de a ajunge la radar. Pentru simplificare, se consideră că lungimile impulsului și ecoului sunt de lungime egală. Acest lucru permite o relație simplă între energia ecoului și semnalul de sondare (utilizat în ecuația radiolocaţiei) fără a lua în considerare posibila diferență introdusă de:
- Reflectarea semnalului transmis, care poate avea un spectru de frecvență diferit, inclusiv:
- Armonicele purtătorului;
- Deplasarea Doppler datorată mișcării țintei.
- Posibilele direcții diferite de polarizare;
- Lungimea neconstantă a unui ecou datorată alungării prin interferența cu alte reflexii de la ținte aflate în aceeași zonă, dar în poziții ușor diferite și, prin urmare, cu un timp de călătorie dus-întors ușor diferit.
Pentru a proiecta un receptor sau un filtru optim care să minimizeze aceste efecte de distorsiune, trebuie utilizate mai multe canale de recepție în paralel. Într-un circuit selectiv, ecoul cu cel mai bun raport semnal/zgomot (inclusiv interferențele) este ales pentru procesarea ulterioară. De asemenea, se păstrează „poziția“ acestui ecou optim.
În general, lățimea de bandă a receptorului este cât mai îngustă posibil pentru a elimina zgomotul din afara frecvențelor pe care ecoul le poate prelua. Prin urmare, BHF = 1/τ este cel mai adesea lățimea de bandă utilizată de o parte și de alta a purtătoarei unui radar cu impulsuri. Zgomotul rămas poate fi filtrat cu ajutorul unui receptor care însumează ecourile de la mai multe impulsuri, presupunând că ținta este staționară în timpul sondajelor succesive. Deoarece zgomotul este aleatoriu, suma zgomotului este mult mai mică decât semnalul de ecou real, iar raportul semnal/zgomot este mult mai bun.
Diagrama de funcționare
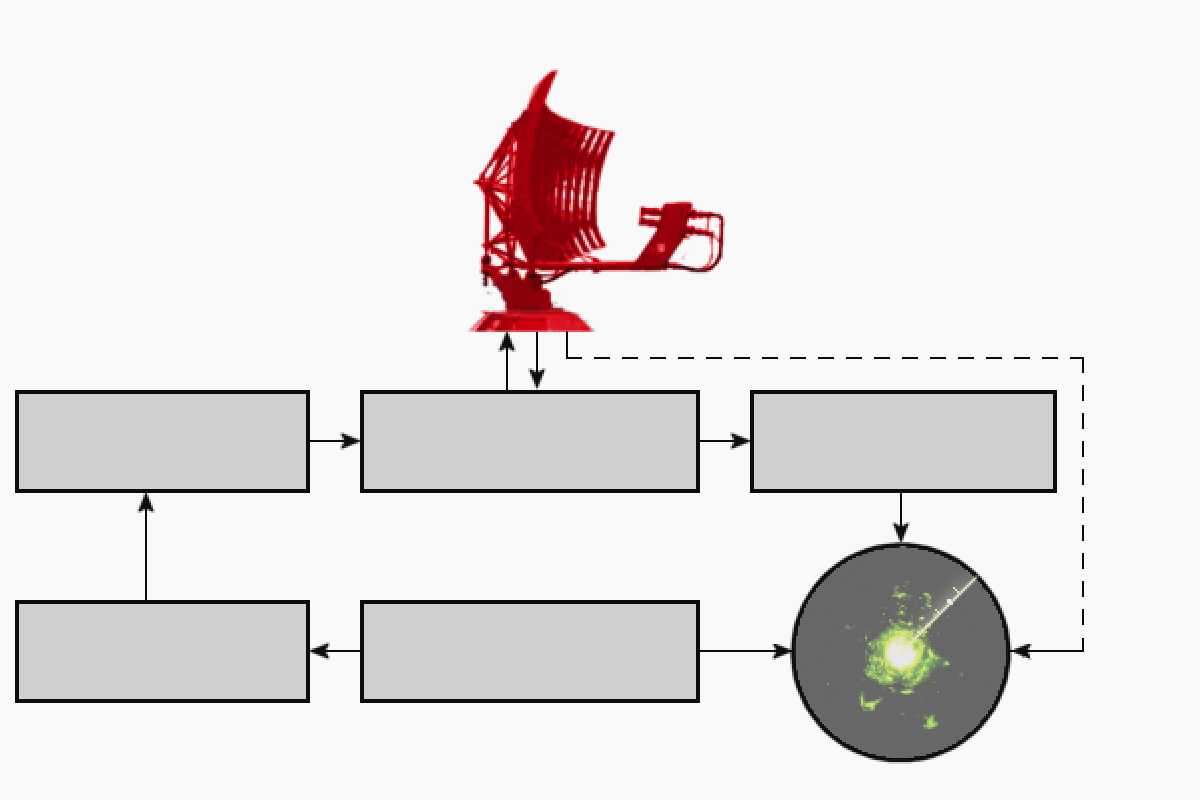
Ilustrație 4: Diagrama funcțională a unui radar primar cu impulsuri

{kind=link}
Proiectarea unui radar cu impulsuri depinde de faptul dacă transmițătorul și receptorul sunt amplasate în același loc (monostatic) sau în două locații diferite (bistatic):
- Un radar monostatic este mai compact și include funcțiile de emisie, recepție și sincronizare într-o singură unitate. Diviziunea muncii în timpul ciclului de funcționare este minimizată prin evitarea întârzierilor de comunicare în circuit.
- Cu toate acestea, trebuie utilizată o antenă radar cu un sistem multiplexor mai complex. Receptorul foarte sensibil trebuie să fie protejat de injecția semnalului foarte puternic de la transmițător. Pentru a realiza acest lucru, un duplexor servește ca o legătură alternativă între antenă și aceste două componente. Acest lucru înseamnă, de asemenea, că receptorul este oprit în timpul transmisiei, ceea ce provoacă un unghi mort în apropierea radarului.
Descrierea modulelor din schema bloc
- Un radar bistatic utilizează antene diferite pentru emisie și recepție. Această configurație permite receptorului să nu necesite protecție față de semnalul transmițătorului. În cel mai simplu caz, un radar monostatic cu impulsuri poate fi utilizat pentru o rețea de antene de recepție care trebuie să aibă o deschidere mare pentru a recepționa din mai multe direcții în același timp. Aceste antene pot fi amplasate la mare distanță una de cealaltă și de transmițător.
- Dezavantajul acestui sistem radar este sincronizarea strictă între transmițător și receptoare. Pentru a cunoaște distanța țintelor în funcție de timpul de întoarcere al ecoului, receptoarele trebuie să cunoască momentul exact al transmiterii fiecărui impuls. Acest lucru se realizează prin intermediul unui semnal de sincronizare la care trebuie adăugată întârzierea de transmisie la fiecare antenă.
- Una dintre primele utilizări ale acestui tip de radar a avut loc în radar Chain Home britanic în timpul celui de-al Doilea Război Mondial. Principala aplicație militară modernă este reprezentată de radarul de deasupra orizontului. Radarul meteorologic de cercetare Poldirad de la Oberpfaffenhofen, în apropiere de München, Germania, este un alt exemplu recent în care radarul monostatic primar este utilizat ca transmițător pentru receptoarele secundare.
- Radarul pasiv este o altă variantă a radarului bistatic. Utilizează emisia diferitelor surse de frecvență radio (radio, televiziune, alte radare cu impulsuri) pentru a calcula poziția țintelor. Aceasta se realizează prin calcularea diferenței de timp dintre recepția directă a semnalului și semnalul reflectat de ținte. Ambiguitatea măsurătorilor poate fi eliminată prin ascultarea oricăror emisii aleatorii ale țintei, care pot indica direcția exactă a acesteia, sau prin triangulație între două radare pasive aflate la distanță.
Utilizări
Radarele cu impulsuri sunt utilizate în principal pentru detectarea pe distanțe lungi, mai ales în domeniul militar, al controlului traficului aerian, al meteorologiei și al teledetecția Pământului cu ajutorul sateliților.