Impulsradar

Figura 1: Misurazione del tempo di volo con radar

Figura 1: Misurazione del tempo di volo con radar


Figura 1: Misurazione del tempo di volo con radar a impulsi (si noti la deviazione X del dispositivo di avvistamento rispetto alla propagazione delle onde elettromagnetiche, fedele alla scala).
Radar a impulsi
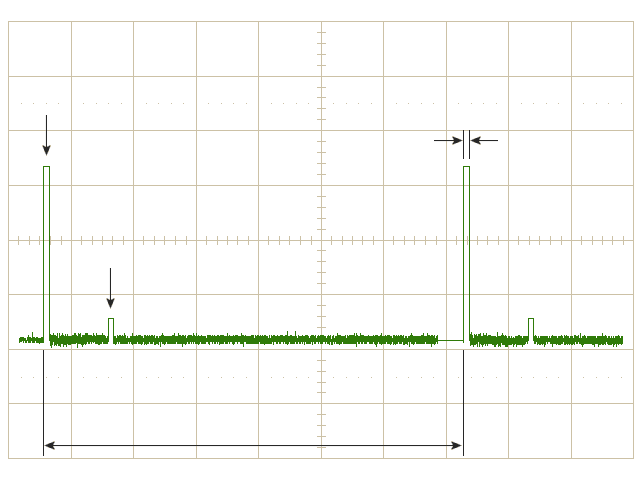
Figura 2: Sequenza temporale di un radar a impulsi

Un radar a impulsi è un dispositivo radar che trasmette impulsi brevi e potenti e riceve i loro segnali di eco durante la pausa della trasmissione. A differenza del radar a onda continua, il trasmettitore viene spento prima del completamento del processo di misura. Questo metodo radar è caratterizzato da una modulazione a impulsi con impulsi di trasmissione molto brevi (tipicamente con una durata dell’impulso di trasmissione di τ ≈ 0,1 … 1 µs). Tra gli impulsi di trasmissione ci sono pause molto lunghe Τ >> τ (tipicamente Τ ≈ 1 ms), denominate tempo di ricezione. La portata degli oggetti riflettenti viene determinata mediante misurazioni del tempo di volo (per un radar fisso) o confrontando le variazioni dello spettro Doppler caratteristiche di una portata con i valori memorizzati in un database per una determinata portata (per un radar su una piattaforma mobile). I radar a impulsi sono solitamente progettati per lunghe distanze e trasmettono con una potenza d’impulso relativamente elevata.
La caratteristica più importante che lo distingue dagli altri metodi radar è il necessario controllo temporale di tutti i processi all’interno del radar a impulsi. L’inizio dell’impulso trasmesso è il riferimento per la misura del tempo di volo. Termina con la transizione del fronte di salita del segnale di eco nel tetto dell’impulso. I ritardi sistematici nell’elaborazione del segnale possono e devono essere corretti quando si calcola la distanza. Le deviazioni casuali influiscono sulla precisione della localizzazione del radar a impulsi.
Segnale trasmesso
La curva di tensione del segnale trasmesso può essere descritta matematicamente come:
| s(t) = A(t)· sin[2πf(t)·t + φ(t)] | (1) |
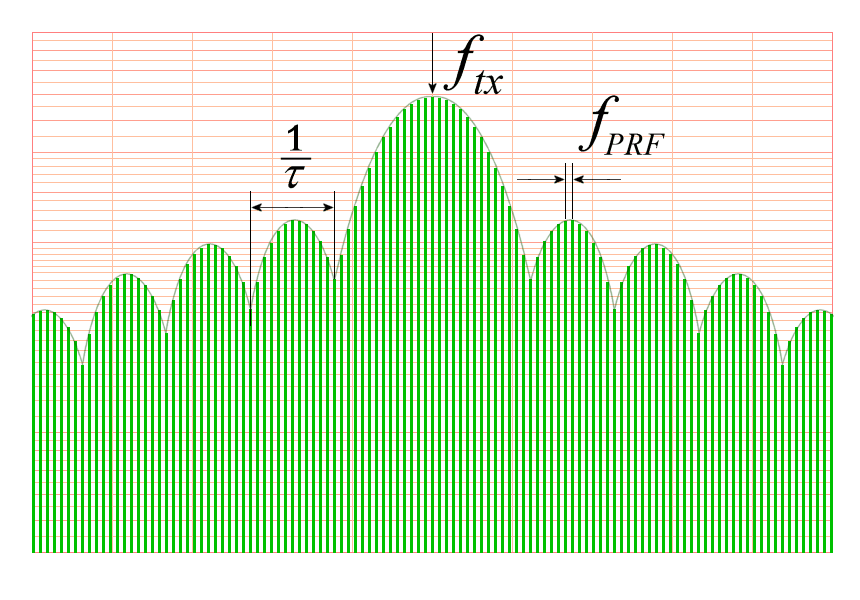
Fig. 3: Spettro di frequenza di una sequenza di impulsi a onda quadra in prossimità della frequenza di trasmissione ftx

Fig. 3: Spettro di frequenza di una sequenza di impulsi a onda quadra in prossimità della frequenza di trasmissione ftx
La funzione A(t) indica una variazione dell’ampiezza in funzione del tempo t, ovvero la modulazione di ampiezza. Nel caso più semplice, il trasmettitore si accende solo brevemente per il tempo τ e rimane nello stato „off” per il resto del tempo. A(t) è quindi = 1 per il caso di trasmissione, altrimenti = 0. La dipendenza dal tempo è quindi determinata dalla frequenza di ripetizione dell’impulso e dal duty cycle. Poiché gli echi radar sono soggetti a varie cause di smorzamento, una vera e propria modulazione di ampiezza, a parte questa funzione di commutazione (ingl. on/off–keying o on/off–keyed transmitter), ha poco senso. L’inviluppo dello spettro di frequenza di una sequenza di impulsi a onda quadra è rappresentato da una curva (sin U)/U. Le componenti essenziali della potenza (si noti la scala logaritmica delle ordinate in Fig. 3) si trovano in una banda BHF = 2/τ in prossimità della frequenza di trasmissione ftx.
La frequenza di ripetizione degli impulsi fPRF e i singoli tempi, ad esempio la durata dell’impulso di trasmissione τ o il tempo di ricezione (Τ − τ), influiscono sui parametri di prestazione del radar, come la distanza minima di misura possibile (l’impulso di trasmissione deve aver lasciato completamente l’antenna) e la distanza massima di misura unica possibile (il segnale di eco deve essere ancora ricevuto prima dell’impulso di trasmissione successivo).
La durata dell’impulso di trasmissione τ influenza in modo significativo la risoluzione di portata ΔR del radar a impulsi. Lo è:
| ΔR = 0,5·τ·c | (2) |
Quanto più breve è l’impulso di trasmissione, tanto più vicini possono essere i due riflettori per essere ancora rilevati come due riflettori. La larghezza di banda del trasmettitore BHF del radar a impulsi aumenta a causa della dipendenza aumenta con l’aumentare della risoluzione del campo.
| BHF = τ−1 | (3) |
Questo limita la portata della semplice modulazione a impulsi. In queste condizioni, con una risoluzione di campo richiesta, l’energia dell’impulso Ep può essere aumentata solo tramite la potenza dell’impulso PS.
Per la portata del radar a impulsi non è decisiva la potenza dell’impulso, ma l’energia dell’impulso:
| Ep = Ps· τ = Pav· Τ = | Pav | con | Ep = contenuto energetico dell’impulso PS = potenza dell’impulso di trasmissione Pav = potenza media |
(4) |
| fPRF |
Un miglioramento significativo di questa situazione può essere ottenuto con una modulazione interna dell’impulso di trasmissione (modulazione intrapulso). Con la compressione dell’impulso possibile nel ricevitore, si risolve la correlazione tra la durata dell’impulso del trasmettitore e la durata dell’impulso del segnale di eco. In questo modo è possibile effettuare una localizzazione a distanza dei vari riflettori entro la durata dell’impulso di trasmissione.
La funzione φ(t) nell’equazione (1) è l’espressione di uno spostamento di fase dell’intero segnale. La fase iniziale del segnale trasmesso può essere nota e calcolabile grazie alla generazione dell’oscillazione. In questo caso, il radar a impulsi deve essere considerato tra i radar coerenti. Tuttavia, la posizione effettiva della fase può anche essere nota, ma lo stato iniziale è imprevedibile. Allora il radar appartiene ai radar pseudo-coerenti. Se questa fase iniziale è completamente indeterminata (caotica), allora il radar appartiene ai radar non coerenti. Solo nel caso di una possibile modulazione intrapulso a codifica di fase, questa funzione assume un ulteriore significato.
Segnale di eco
Di solito si assume che la durata dell’impulso trasmesso sia uguale alla durata dell’impulso dell’eco riflesso. Pertanto, il rapporto tra potenza di trasmissione e potenza di ricezione utilizzato nell’equazione di base del radar può essere omesso. In pratica, però, questo segnale di eco è solo lontanamente simile al segnale trasmesso.
- La riflessione può modificare lo spettro del segnale trasmesso:
- Possono verificarsi onde armoniche aggiuntive rispetto alla frequenza portante.
- Alla frequenza portante possono essere imposte una o più frequenze Doppler.
- La direzione della polarizzazione può cambiare.
- Anche la durata dell’impulso del segnale di eco non è costante. La durata dell’impulso riflesso può essere notevolmente allungata dall’interferenza delle riflessioni su superfici parziali con distanze leggermente diverse, quindi con tempi di transito diversi.
In definitiva: il segnale eco è soggetto a così tante influenze che la forma del segnale eco nel risultato deve essere considerata sconosciuta. Per poter costruire un ricevitore o un filtro adattato, è necessario costruire in parallelo diversi canali di ricezione che tengano conto di tutte le possibili deformazioni del segnale. In un circuito di selezione (greatest-of), il segnale eco con la migliore distanza dal rumore o dai segnali di disturbo viene elaborato ulteriormente. La „posizione“ dell’interruttore più grande viene memorizzata come informazione importante per l’identificazione di questo segnale d’eco.
In generale, la larghezza di banda di ricezione viene mantenuta il più piccola possibile per evitare disturbi inutili e quindi, per un semplice radar a impulsi, la larghezza di banda viene selezionata solo con BHF = 1/τ. L’influenza del rumore può essere ridotta nel ricevitore mediante l’integrazione degli impulsi. In questo caso, si forma una somma di periodi di impulso in cui si presume che l’oggetto riflettente sia costante in posizione durante questi periodi di impulso. Poiché il rumore è statisticamente distribuito, la sua somma non può raggiungere la somma dei segnali di eco. Il rapporto segnale/rumore viene migliorato da questa misura.
Struttura, diagramma a blocchi
missione/ricezione
di orologi
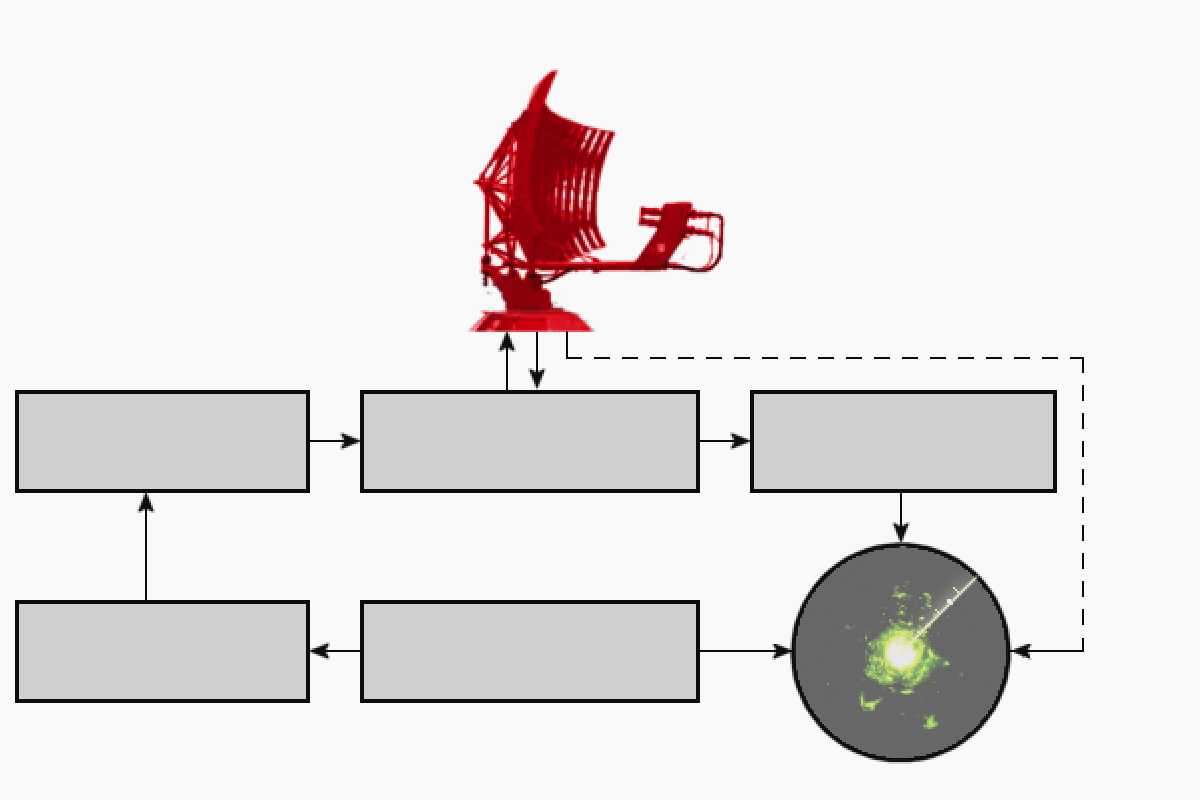
Figura 4: Struttura di un radar monostatico a impulsi

{kind=link}
La progettazione di un radar a impulsi dipende dal fatto che il trasmettitore e il ricevitore si trovino nello stesso luogo (radar monostatico) o che i due componenti operino in luoghi completamente diversi (radar bistatico).
Oltre alla sua struttura compatta, un radar monostatico a impulsi ha il vantaggio di poter concentrare il controllo della temporizzazione, importante per i radar a impulsi, in un blocco di sincronizzazione centrale mediante un sistema di trigger radar. I tempi di propagazione interna degli impulsi sincronizzati possono così essere mantenuti bassi. Un’antenna radar complessa può essere utilizzata sia per la trasmissione che per la ricezione nel processo multiplex. Lo svantaggio è che per trasmettere, il ricevitore radar altamente sensibile deve spesso essere spento da un interruttore di trasmissione/ricezione per la sua stessa protezione.
Descrizione degli assiemi nello schema a blocchi
In un radar bistatico a impulsi, il ricevitore è situato in un punto diverso dal trasmettitore con una propria antenna. Il vantaggio è che il ricevitore può essere utilizzato senza misure di protezione significative contro l’eccessiva potenza di trasmissione. Nel caso più semplice, per un radar monostatico a impulsi viene creata una rete di siti di ricezione aggiuntivi. (Esempio: radar meteorologico Poldirad, Oberpfaffenhofen). Le antenne riceventi non sono molto direttive: devono essere in grado di ricevere da più direzioni contemporaneamente. Lo svantaggio è la sincronizzazione molto complessa. Il ricevitore deve anche ricevere il segnale di trasmissione diretta in parallelo ai segnali di eco e generare un segnale di sincronizzazione a partire da questo e dalla distanza nota dal trasmettitore. Le principali applicazioni militari delle configurazioni bistatiche sono i radar Over-The-Horizon (radar OTH).
Una varietà di radar bistatici sono radar passivi. Questi utilizzano varie emissioni HF parassite (trasmettitori radio o televisivi, o radar a impulsi stranieri) e calcolano la posizione del bersaglio dalla differenza tra il tempo di ricezione diretta di un segnale e il tempo di propagazione aggiuntivo dei segnali di eco. Le ambiguità nella misurazione possono essere eliminate da un lato con il puntamento diretto delle emissioni di interferenza dal bersaglio o con la sincronizzazione di due radar passivi che operano in luoghi diversi.
Applicazione
I radar a impulsi sono progettati principalmente per le lunghe distanze. Il principale campo di applicazione è ancora il settore militare. Altre aree di applicazione sono il controllo del traffico aereo, l’osservazione del tempo (in particolare il radar delle precipitazioni) e il telerilevamento satellitare della superficie terrestre.