Pulzní radar

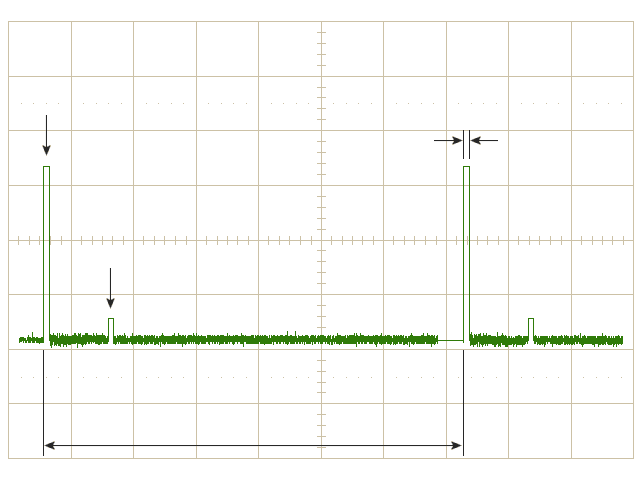
Obrázek 1: Měření zpoždění radaru

Obrázek 1: Měření zpoždění radaru


Pulzní radar
Obrázek 2: Impulsní parametry radaru

Pulsní radar je radarové zařízení, které vysílá krátké silné impulsy a mezi nimi (během tzv. klidového intervalu) přijímá ozvěny. Na rozdíl od radaru s kontinuálním vyzařováním je vysílač pulzního radaru vypnut až do ukončení měření. Charakteristickým rysem této metody je, že sondovací impulsy mají velmi krátkou dobu trvání (obvykle je jejich doba trvání τ ≈ 0,1 … 1 µs. Mezi sondážními impulzy jsou velmi dlouhé pauzy Τ >> τ, které se nazývají přijímací intervaly (obvykle Т ≈ 1 ms), jak je znázorněno na obrázku 2. Vzdálenosti k odrážejícím se objektům se určují měřením doby zpoždění echa, jak je znázorněno na obrázku 1 (u stacionárních radarů), nebo porovnáním charakteristických změn ve spektru dopplerovského echa s hodnotami pro zadané vzdálenosti uloženými v databázi (u radarů na rychle se pohybujících plošinách). Impulsní radary jsou obvykle určeny pro dlouhé dosahy cílů a vysílají relativně vysoký impulsní výkon.
Důležitým rozlišovacím znakem ve srovnání s jinými radarovými metodami je nutnost časové synchronizace všech procesů probíhajících v pulzním radaru. Náběžná hrana vyslaného impulzu určuje počátek referenčního bodu pro měření zpoždění signálu ozvěny. Konec intervalu zpoždění je okamžik, kdy vzestupná hrana signálu echo dosáhne svého vrcholu. Zpoždění vznikající při zpracování signálu jsou systematická a musí být zohledněna při výpočtu cílového dosahu. Náhodné odchylky v době zpoždění ovlivňují přesnost pulzního radaru.
Sondážní signál
Tvar sondovacího signálu lze matematicky popsat následujícím výrazem:
| s(t) = A(t)· sin[2πf(t)·t + φ(t)] | (1) |
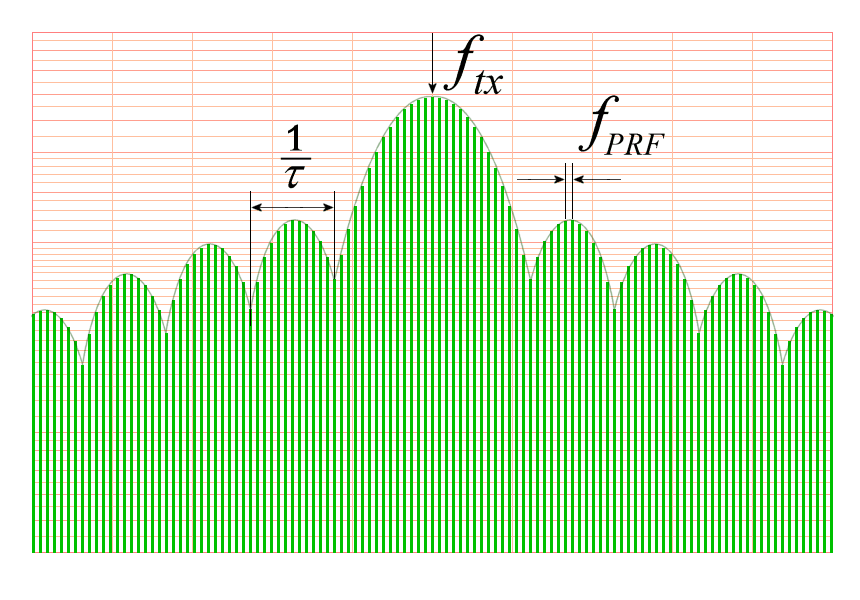
Obrázek 3. Frekvenční spektrum obdélníkové sekvence pulzů v blízkosti nosné frekvence ftx

Funkce A(t) popisuje změnu amplitudy v závislosti na čase t, například amplitudovou modulaci. V nejjednodušším případě je vysílač zapnut na krátkou dobu (trvání τ) a po zbytek času zůstává „vypnutý”. Proto je A(t) = 1 v době vysílání impulsu a A(t) = 0 po zbytek času. Časová závislost je dána opakovací frekvencí pulzů a střídou signálů.. Vzhledem k tomu, že v reakcích radaru dochází k různým ztrátám, které nelze přesně zohlednit, nemá skutečná amplitudová modulace velký smysl, kromě funkce přepínání (zapnuto/vypnuto). Obálka frekvenčního spektra periodického řetězce impulsů je popsána funkcí tvaru (sin x)/x (obr. 3), někdy nazývanou oblouková sinusoida. Hlavní část vyzářeného výkonu (všimněte si logaritmického měřítka na ordinátní ose) se nachází ve frekvenčním intervalu BHF = 2/τ v blízkosti nosné frekvence signálu ftx.
Opakovací frekvence impulsů fPRF, doba trvání sondážního impulsu τ a doba trvání intervalu příjmu (Τ − τ) určují ukazatele kvality radaru, jako je minimální dosah (sondážní impuls musí zcela opustit anténu) a maximální jednoznačně měřitelný dosah (signál echa musí být přijat před vysláním dalšího sondážního impulsu). Doba trvání sondážního impulsu τ určuje především rozlišovací schopnost ΔR pulzního radaru, která je popsána výrazem:
| ΔR = 0,5·τ·c | (2) |
Čím kratší je sondážní signál, tím blíže k sobě mohou být dva reflektory, které však budou detekovány jako dva samostatné objekty, nikoli jako jeden rozšířený objekt. Šířka spektra BHF sondážního signálu se zvětšuje se snižující se dobou trvání pulzu:
| BHF = τ−1 | (3) |
V případě jednoduché pulzní modulace omezuje zkrácení doby trvání pulzu maximální dosah radaru. Za těchto podmínek lze energii sondážního signálu Ep při daném rozlišení rozsahu zvýšit pouze o výkon pulzu PS. Pro maximální dosah je rozhodujícím faktorem energie impulzu, nikoliv jeho výkon:
| Ep = Ps· τ = Pav· Τ = | Pav | kde | Ep = energie impulzu; PS = vyzářený pulzní výkon; Pav = průměrný výkon (během doby sondování). |
(4) |
| fPRF |
Výrazného zlepšení této situace lze dosáhnout vnitřní modulací sondážního impulzu (intra-pulse modulation). Poměr mezi dobou trvání sondovacího impulsu a dobou trvání impulsu na výstupu přijímače je určen kompresí impulsu v přijímači. Měření souřadnic několika reflektorů, včetně určení vzdálenosti ke každému z nich, lze provádět během trvání sondážního impulzu.
Funkce φ(t) ve výrazu (1) popisuje fázový posun celého signálu. Radar, u kterého je počáteční fáze sondážního signálu známa nebo ji lze vypočítat, se nazývá plně koherentní. Pokud je známa aktuální hodnota fáze, ale není známa její počáteční hodnota, radar se řadí k jednomu z typů pseudokoherentních radarů. Pokud je počáteční fáze zcela neznámá (mění se chaoticky), je radar nekoherentní. Funkce φ(t) se stává důležitou pro případy vnitropulsní modulace s fázovým kódováním.
Echo signál (odražený signál)
Obvykle se předpokládá, že doba trvání sondážního impulzu a doba trvání odraženého echosignálu jsou stejné. Proto ve výpočtech, kde se jedná o výkon vysílaného a přijímaného signálu (což je případ základní rovnice radiolokace), lze dobu trvání těchto signálů vynechat.
- Ve spektru:
- mohou se na nosné frekvenci objevit další harmonické;
- Na nosnou frekvenci může být nanesena jedna nebo více dopplerovských frekvencí.
- Směr polarizace se může změnit.
- Doba trvání echo signálu není konstantní a může se výrazně prodloužit v důsledku interference signálů odražených od blízko umístěných cílových prvků (proto mají rozdíly v době zpoždění).
V důsledku toho je signál echa vystaven tolika vlivům, že jeho tvar je považován za neznámý. Nicméně optimální přizpůsobené přijímače nebo přizpůsobené filtry se vytvářejí pomocí více paralelních kanálů, které zohledňují možné deformace signálu. Tato zařízení poskytují nejvyšší možný poměr signálu k šumu + rušení (v anglických zdrojích: Signal to Noise Plus Interference Ratio, SNIR). Z jejich výstupu přichází signál k dalšímu zpracování. V tomto případě je zapamatován okamžik (poloha na časové ose) maximálního překročení šumu signálem jako důležitý parametr, který identifikuje tento signál mezi signály přijatými od jiných cílů.
Obecně se šířka pásma přijímače volí co nejužší, aby se snížila úroveň přijímaného nežádoucího šumu a rušivých oscilací. V případě jednoduchého rádiového impulzu je šířka pásma přijímače určena poměrem BHF = 1/τ. Vliv šumu lze také snížit akumulací impulsů v přijímači. To znamená součet přijatých impulzů v několika sondážních periodách. Předpokládá se, že během akumulačního intervalu (několik sondážních period) zůstane cíl nehybný, tj. zpoždění mezi impulsy bude konstantní a v každé následující periodě bude signál echa na stejném místě na časové ose. Šum má náhodné rozložení amplitud a bude přidán s náhodnými fázemi. Proto bude výsledek jeho součtu vždy menší než součet kumulovaných ozvěn. Použitím akumulace se tak zlepšuje poměr signálu k šumu.
Konstrukce, blokové schéma
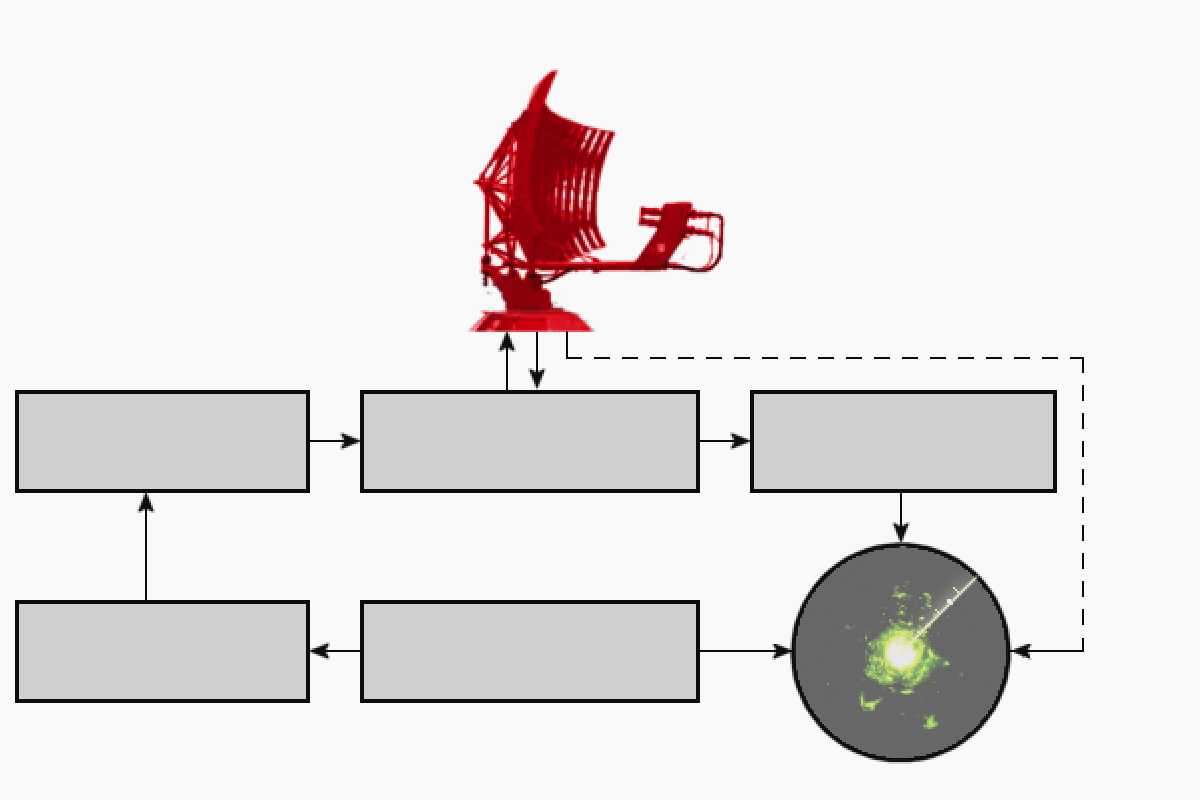
Obrázek 4: Blokové schéma monostatického pulzního radaru

{kind=link}
Konstrukce pulzního radaru závisí na tom, zda jsou vysílač a přijímač umístěny na stejném místě (kombinovaný, monostatický radar), nebo jsou obě tyto součásti umístěny na zcela odlišných místech (vícepolohový, bistatický radar).
Kombinovaný pulzní radar má kromě své kompaktní konstrukce také tu výhodu, že důležitá časovací zařízení pro pulzní radar mohou být soustředěna v centrální časovací jednotce. Vnitřní zpoždění spínacích zařízení tak může být malé. Složitá a drahá radarová anténa může být díky použití anténního přepínače použita jak pro vysílání, tak pro příjem signálů.
Nevýhodou je nutnost vypnutí vysoce citlivého přijímače pomocí přepínače antény po dobu vyzařování sondážního signálu, aby nedošlo k jeho výpadku vlivem vysokého výkonu vysílače. Během této doby není příjem signálu možný.
Popis bloků v blokovém schématu:
U bistatického pulzního radaru má přijímač vlastní anténu ve vzdálenosti od vysílače. Výhodou je, že k ochraně přijímače před vysokým výkonem vysílače nejsou nutná žádná složitá opatření. V nejjednodušším případě je síť vytvořena rozšířením stávajícího monostatického radaru o nové přijímače. Příklad: meteorologický radar Poldirad v Oberpfaffenhofenu v Německu (poblíž Mnichova). Přijímací antény nejsou všesměrové: musí zajišťovat příjem z několika směrů současně. Nevýhodou je zde velmi složitá synchronizace. Současně s echo signály musí přijímač přijímat také přímý signál z vysílače. Podle tohoto signálu a známé vzdálenosti od vysílače lze generovat synchronizační signál. Hlavní aplikací bistatického schématu ve vojenských aplikacích jsou radary nad horizontem.
Pasivní sledovací systémy (Pasivní radary) jsou typem bistatických radarů. Využívají různé vysokofrekvenční emise (rozhlasové nebo televizní vysílání, pulzní radary). U pasivních radarů se poloha cíle vypočítá na základě rozdílu mezi dobou příchodu přímého signálu a dodatečnou dobou zpoždění odraženého signálu. Nejednoznačnost měření se eliminuje přímým určením směru k cíli podle jeho dopadajících emisí nebo synchronizací dvou pasivních radarů umístěných na různých místech.
Aplikace
Impulsní radary jsou určeny především pro velké vzdálenosti k cílům. Jejich hlavním využitím je stále vojenská oblast. Dalšími aplikacemi jsou řízení letového provozu, pozorování počasí (zejména srážek) a družicový dálkový průzkum Země.