Radar pulsé

Figure 1 : Principe de sondage par impulsions.

Figure 1 : Principe de sondage par impulsions.


Radar pulsé
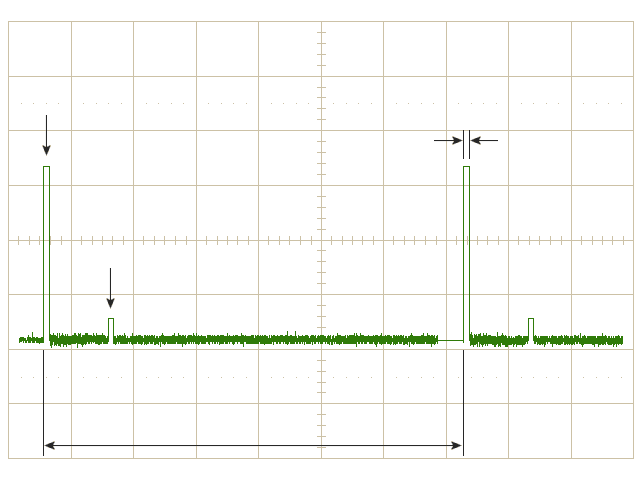
Figure 2 : Relation entre les impulsions et les échos.

Un radar pulsé est un appareil de télédétection qui émet des impulsions puis se met en mode écoute de l’écho renvoyé par les cibles dans l’environnement. Au contraire des radars à ondes entretenus, le transmetteur est mis hors-circuit durant le temps d’écoute. Cette méthode d’écholocation est caractérisée par la transmission d’impulsions de très courtes de durée τ de l’ordre de ≈ 0,1 à 1 µs et d’un temps d’écoute Τ beaucoup plus long (>> τ) de l’ordre de 1 ms, comme démontré dans la figure 2. La distance à la cible est déterminée par le temps aller-retour du signal (pour un radar stationnaire) ou par la comparaison du spectre Doppler entre le signal émis et l’écho par rapport à la distance (pour un radar mobile). Les radars pulsés sont surtout conçus pour la détection à longue portée et émettent donc des impulsions très puissantes.
Une différence importante avec les autres types de radar est la nécessité d’une coordination efficace du temps de chacun des processus dans le circuit du radar. La bordure avant de l’impulsion est le temps de référence de tout le processus. Celui-ci se termine par la réception du front d’onde de l’écho. Tout retard systématique dans le circuit interne du processeur doit être pris en compte pour obtenir le temps aller-retour réel et donc de distance de la cible. Toute variation temporelle aléatoire qui peut s’y ajouter influencera directement la précision du radar.
Signal transmis
La forme de l’onde transmise peut être décrite mathématiquement par :
| s(t) = A(t)· sin[2πf(t)·t + φ(t)] | (1) |

Figure 3 : Décomposition du spectre de fréquences associé à une onde carré à la fréquence de la porteuse ftx

Figure 3 : Décomposition du spectre de fréquences associé à une onde carré à la fréquence de la porteuse ftx
La fonction A(t) est la variation de l’amplitude de l’impulsion avec le temps, c’est-à-dire sa modulation. Dans le cas le plus simple, le transmetteur émet durant de courtes périodes τ et est hors-circuit le reste du temps. A(t) est ainsi égal à 1 durant τ et zéro autrement. La fonction temporelle est déterminée par la fréquence de répétition des impulsions et le cycle d’utilisation. Comme les échos revenant au radar sont sujets à diverses pertes, une modulation de l’amplitude différente du signal dans ce cas ne donne aucun avantage à son décodage dans le récepteur. Par contre, une telle onde carrée peut être décomposé en un spectre de fréquence égal à une fonction (sin x)/x. L’essentiel de la puissance transmise (attention l’échelle est logarithmique dans la figure 3) est dans la région de fréquences BHF = 2/τ autour de la fréquence de l’onde porteuse ftx.
La fréquence de répétition des impulsions (FRI), leur durée τ et le temps d’écoute (Τ − τ) ont une influence sur les performances du radar : distance aveugle près du radar et portée maximale non-ambigüe. La longueur de l’impulsion τ affecte également la cellule de résolution ΔR du radar :
| ΔR = 0.5·τ·c | (2) |
Plus l’impulsion est courte, mieux le radar peut résoudre deux cibles situés l’une derrière l’autre, au lieu d’obtenir un seul gros objet. Cependant, la largeur de bande de l’onde porteuse BHF augmente avec la diminution de la largeur de l’impulsion :
| BHF = τ−1 | (3) |
Le raccourcissement de l’impulsion limite aussi la portée maximale dans le cas simple. En effet, l’énergie Ep contenue dans l’impulsion dépend de sa longueur et plus cette dernière est courte, plus elle est faible à une distance donnée du radar et moins il y a de probabilité qu’une puissance mesurable soit retournée au radar.
Pour la portée maximale, l’énergie est donc le facteur crucial et non la puissance d’émission :
| Ep = Ps· τ = Pmoj· Τ = | Pmoj | avec | Ep = énergie de l’impulsion PS = puissance du transmetteur Pmoj = puissance moyenne |
(4) |
| fFRI |
Des améliorations significatives peuvent être apportées en modulant l’enveloppe de l’impulsion (compression d’impulsion) où une impulsion longue est comprimée en une plus courte. La relation entre la durée de l’impulsion transmise et celle retournée est résolue par la décompression au niveau du récepteur. La position individuelle des cibles sondées par l’impulsion compressée peut aussi être obtenue par le temps aller-retour.
La fonction φ(t) de l’équation (1) exprime la différence de phase dans le temps du signal. La phase initiale émise par le transmetteur est toujours la même et son évolution temporelle sera extrapolée facilement dans le cas d’un radar cohérent. Dans le cas d’un radar cohérent à la réception (ou pseudo-cohérent), la phase initiale est aléatoire et doit être notée pour fin de comparaison avec l’écho. Si elle n’est pas notée, le radar est dit « incohérent ». Cette notion est importante pour la modulation intra-impulsion des impulsions compressées et l’analyse du décalage Doppler.
Écho
La forme de l’onde de l’écho est influencée par de nombreux phénomènes qui ne permettent pas de la connaître avant son arrivée au radar. Pour simplification, les longueurs de l’impulsion et de l’écho sont considérées comme d’égale longueur. Cela permet de faire un rapport simple entre l’énergie de l’écho et du signal de sondage (utilisé dans l’équation fondamentale du radar) sans tenir compte de la différence possible introduit par :
- La réflexion du signal transmis qui peut avoir un spectre de fréquences différent comportant :
- Des harmoniques de la porteuse ;
- Un décalage Doppler dû au mouvement de la cible.
- La direction de polarisation possiblement différente ;
- La longueur non constante d’un écho due à un allongement par interférence avec d’autres réflexions venant de cibles dans la même zone mais de positions légèrement différentes et donc prenant un temps aller-retour légèrement différent.
Afin de concevoir un récepteur ou un filtre adapté qui minimise ces effets de déformation, plusieurs canaux de réceptions doivent être utilisés en parallèle. Dans un circuit sélectif, l’écho ayant le meilleur rapport signal sur bruit (incluant les interférences) est choisi pour le reste du traitement. La « position » de cet écho optimal est aussi conservée.
En général la largeur de bande du récepteur est aussi mince que possible pour éliminer le bruit extérieur aux fréquences que peux prendre l’écho. Par conséquent, BHF = 1/τ est le plus souvent la largeur de bande utilisé de chaque côté de la porteuse d’un radar pulsé. Le bruit restant peut être filtré avec un récepteur qui somme les échos provenant de plusieurs impulsions en prenant comme hypothèse que la cible est immobile durant ces sondages successifs. Comme le bruit est aléatoire, la somme du bruit est beaucoup plus faible que le signal réel de l’écho et le rapport signal sur bruit est bien meilleur.
Diagramme de fonctionnement
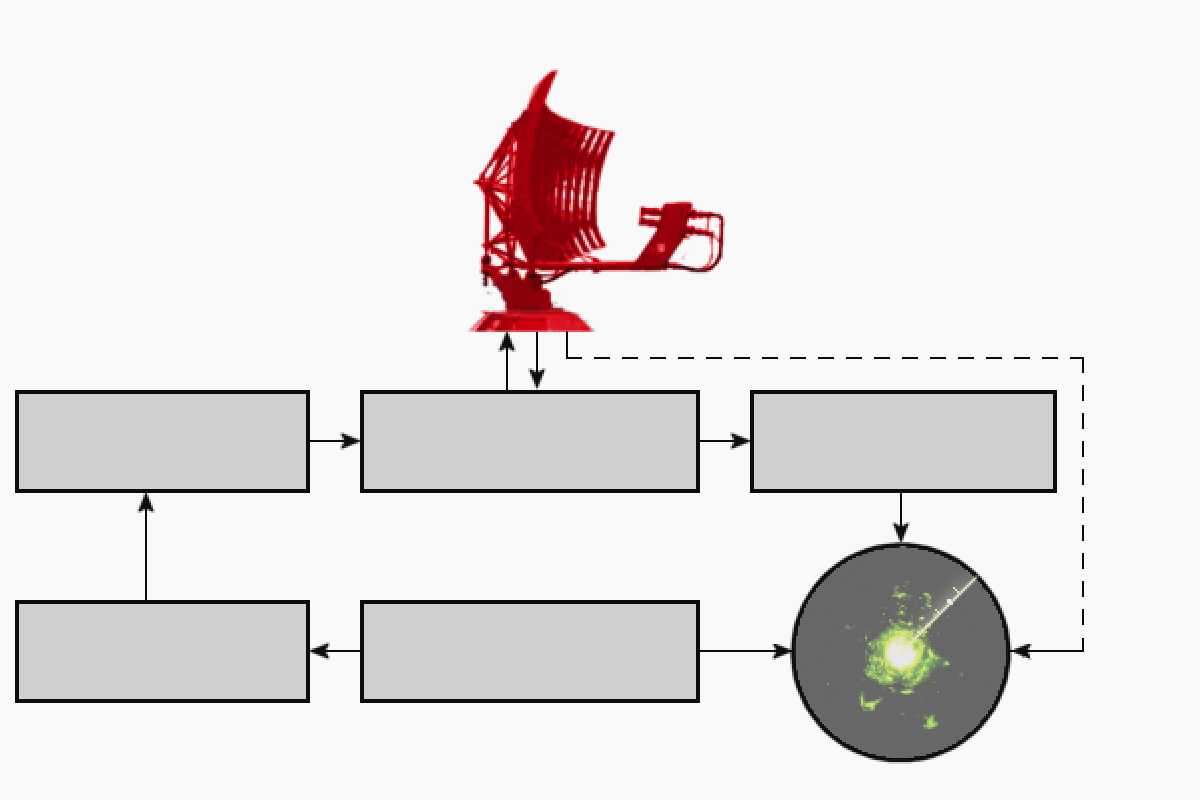
Figure 4 : Diagramme de fonctionnement d’un radar primaire pulsé

{kind=link}
La conception d’un radar pulsé varie selon que le transmetteur et le récepteur sont colocalisés (monostatique) ou à deux endroits différents (bistatique) :
- Un radar monostatique est plus compact. Il inclut les fonctions d’émission, de réception et de synchronisation dans une même unité. La répartition des tâches lors du cycle de fonctionnement est minimisée en évitant les délais reliés au temps de communication dans le circuit.
- Une antenne radar avec un système plus complexe à multiplexeur doit être cependant utilisée. Il faut ainsi protéger le récepteur très sensible de toute injection du signal très puissant du transmetteur. Pour y parvenir, un duplexeur sert de lien alternatif entre l’antenne et ces deux composantes. Cela veut aussi dire que le récepteur est mis hors-circuit durant la transmission ce qui cause une distance aveugle près du radar.
Description des modules dans le schéma synoptique
- Un radar bistatique utilise des antennes différentes pour l’émission et la réception. Cette configuration permet au récepteur de ne pas nécessiter de protection contre le signal du transmetteur. Dans le cas le plus simple, un radar monostatique pulsé peut servir à un réseau d’antennes réceptrices qui doivent avoir une large ouverture afin de recevoir de plusieurs directions à la fois. Ces antennes peuvent être situées à des endroits très éloignés l’un de l’autre et loin de l’émetteur.
- Le désavantage de ce système radar est la synchronisation rigoureuse entre l’émetteur et les récepteurs. En effet, afin de connaître la distance des cibles par le temps aller-retour de l’écho, il faut que les récepteurs sachent exactement le temps d’émission de chacune des impulsions. Ceci se fait par un signal de synchronisation auquel il faut ajouter le délai de transmission à chaque antenne.
- Un des premiers usages de ce type de radar est le Chain Home britannique durant la Seconde Guerre mondiale. La principale application militaire moderne est le radar trans-horizon. Le radar météorologique Poldirad de recherche à Oberpfaffenhofen, près de Munich en Allemagne, est un autre exemple récent où le radar monostatique primaire est utilisé comme émetteur pour des récepteurs secondaires.
- Le radar passif est une autre variante du radar bistatique. Il utilise l’émission de diverses sources de radiofréquences (radio, télévision, autres radars pulsés) pour calculer la position de cibles. Pour ce faire, il calcule la différence temporelle entre la réception directe du signal et celui réfléchi par les cibles. Les ambiguïtés de mesure peuvent être éliminées en écoutant toute émission aléatoire de la cible, qui peut donner sa direction exacte, ou par triangulation entre deux radars passifs éloignés l’un de l’autre.
Utilisations
Les radars pulsés sont surtout utilisés pour la détection à longue portée, principalement dans les domaines militaire, du contrôle du trafic aérien, de la météorologie et de la détection par satellite.