Многолучевой метод определения высоты цели

Рисунок 1. К пояснению многолучевого метода определения высоты цели
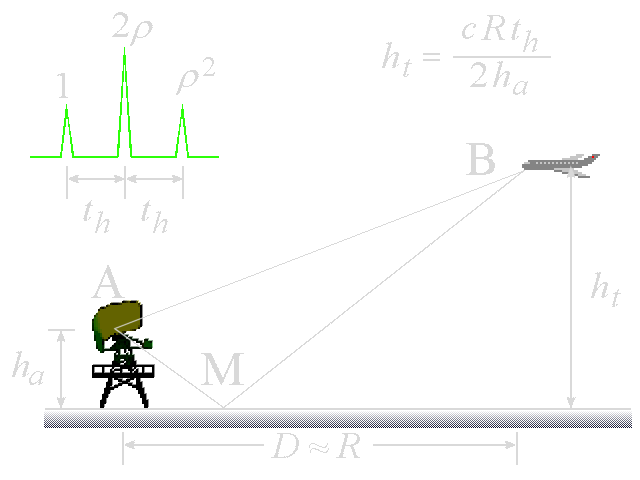
Рисунок 1. К пояснению многолучевого метода определения высоты цели
Многолучевой метод определения высоты цели
Традиционно высота цели определяется при помощи трехкоординатных радиолокаторов воздушного наблюдения, в которых используется несколько лучей в угломестной плоскости или применяется один или больше сканирующих лучей карандашного (игольчатого) типа для определения угла места цели. В прошлом трехкоординатные радиолокаторы широко использовались, не смотря на то, что их стоимость могла в 4 … 10 раз превышать стоимость двухкоординатного (азимут, дальность) радиолокатора воздушного наблюдения. Кроме этого, трехкоординатные радиолокаторы имеют невысокую точность определния высоты цели при малых углах места из-за эффекта многолучевого распространения, когда основной луч (главный лепесток диаграммы направленности антенны) «освещал» поверхность Земли или моря.
Определение высоты цели, основанное на многолучевой структуре отражения, в двухкоординатных широкополосных радиолокаторах имеет некоторые важные преимущества в сравнении с определением высоты с использованием обычных трехкоординатных радиолокаторов. При условии значительного разрешения по дальности прямой эхо-сигнал может быть отделен от эхо-сигнала, отраженного от земли. Разница во времени прихода между этими сигналами зависит от высоты цели (в предположении плоской земной поверхности). Многолучевой эхо-сигнал определяется наличием четырех путей распространения электромагнитной энергии от антенны радиолокатора до цели и обратно (Рисунок 1). Первый из них — это прямое распространение зондирующего сигнала до цели по пути АВ и обратное распространение эхо-сигнала по этому же пути ВА. Второй путь — это распространение до цели отраженного от земли зондирующего сигнала (путь АМВ) и обратное распространение по пути ВА, то есть АМВ+ВА. Существует также противоположный путь такой же длины (и с таким же временем задержки сигнала), то есть АВ+ВМА. Четвертый путь — это путь, когда распространение и зондирующего и отраженного сигнала происходит с отражением от земной поверхности АМВ+ВМА=2∙АМВ. Время задержки th между сигналом, прошедшим первый путь, и сигналом прошедшим второй (третий) путь, а также между последними и сигналом, прошедшим четвертый путь можно определить при помощи соотношений, получаемых из Рисунка 1:
| th = | 2ha · ht | где | ha = высота подъема антенны радиолокатора ht = высота цели c = скорость распространения электромагнитной энергии; R = дальность до цели. |
(1) |
| c · R |
Учитывая, что ht /R = sin Θe (Θe – угол места цели), можно записать:
| sin Θe = | c · th | где | Θe = elevation angle th = run time difference |
(2) |
| 2 ha |
| ht = | c · R · th | (3) |
| 2 ha |
Например, если ha = 100 футов, ht = 10 000 футов и R = 50 морских миль, то время задержки между сигналами, прошедшими по разным путям распространения th = 6,69 нс, что требует для их разрешения ширины спектра не меньше 149,5 МГц. Чем больше будет угол места цели, тем больше будет разница между путями многолучевого распространения и тем легче будет измерить точное значение временной задержки th. На практике радиолокационные системы со сжатием импульса могут иметь разрешение по дальности около 1 метра.