Perda de flutuação
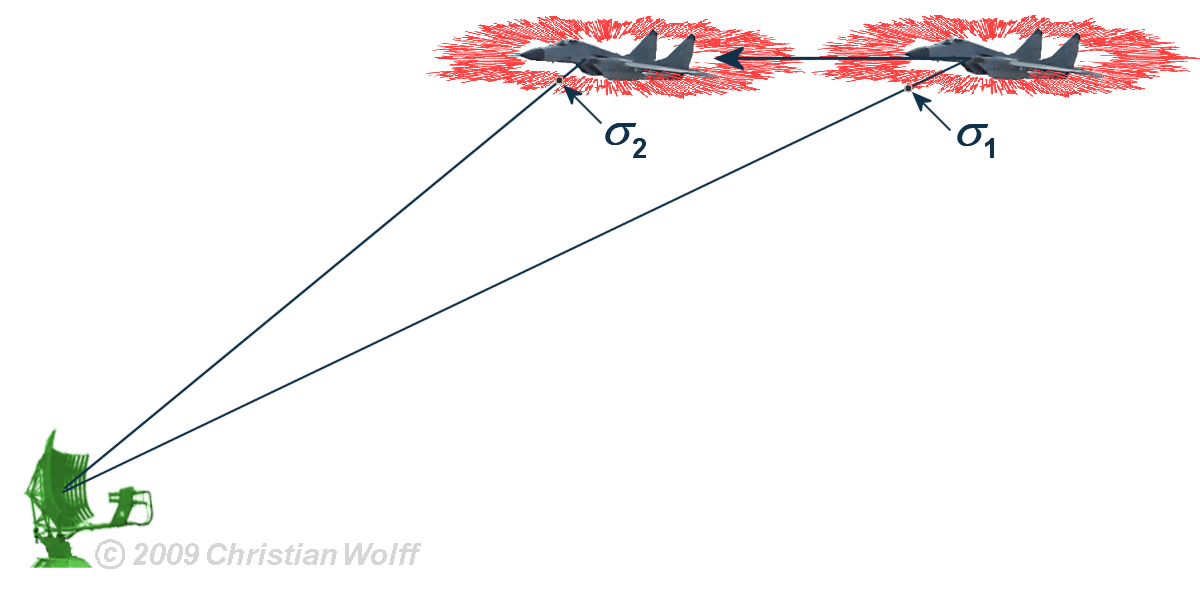
Figura 1: O diagrama rotativo como causa da flutuação

Perda de flutuação
A flutuação do sinal refletido é baseada no diagrama complicado da seção transversal relativa do radar (RCS). Num movimento para frente, o diagrama RCS do avião é girado na referência ao conjunto de radar. Causadas pelas mudanças temporais do curso da mira, as amplitudes e mudanças de fase afetam uma forte flutuação da força do campo de recepção na antena do radar.
Os modelos Swerling foram introduzidos em 1954 pelo matemático americano Peter Swerling e são usados para descrever as propriedades estatísticas da seção transversal do radar de objetos com superfície formada complexa. De acordo com os modelos de Swerling, o RCS de um objeto refletor baseado na função de densidade de probabilidade chi-quadrado com graus de liberdade específicos. Esses modelos são de particular importância na teoria da tecnologia radar. Existem cinco modelos Swerling diferentes, numerados com os algarismos romanos I a V:
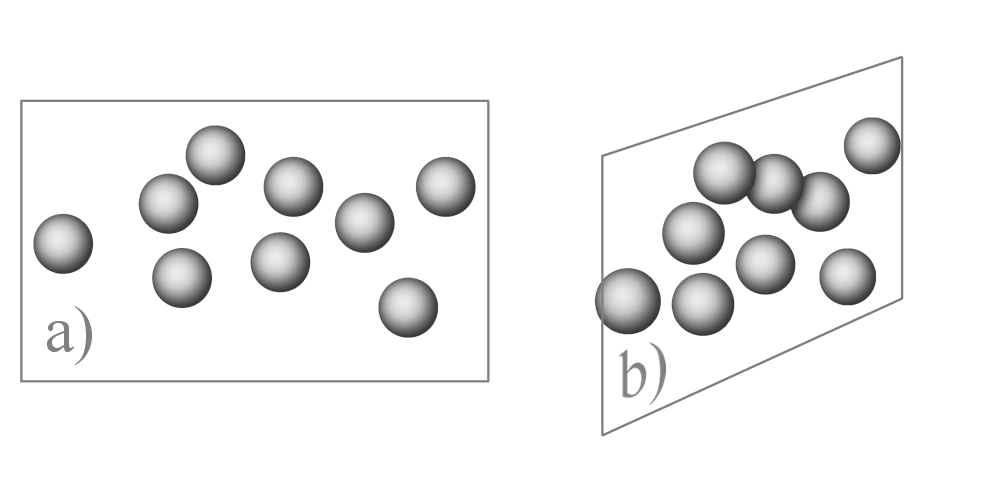
Figura 2: Swerling I e II: O alvo consiste em um número de refletores isotrópicos igualmente grandes que são distribuídos em uma superfície. Outro ângulo de aspecto da mesma montagem (vista b) resulta em outras distâncias e, portanto, em outras interferências.
Figura 2: Swerling I e II: O alvo consiste em um número de refletores isotrópicos igualmente grandes que são distribuídos em uma superfície. Outro ângulo de aspecto da mesma montagem (vista b) resulta em outras distâncias e, portanto, em outras interferências.
Desvio de alvo I (Swerling I Target)
Este caso descreve um alvo cuja magnitude do sinal retroespalhado é relativamente constante durante o tempo de espera. Varia de acordo com uma função de densidade de probabilidade do chi-quadrado com dois graus de liberdade (m = 1). A seção transversal do radar é constante de pulso a pulso, mas varia independentemente de varredura para varredura. A densidade de probabilidade do RCS é dada pela distribuição de Rayleigh:

 (44)
(44)Onde σaverage é a média aritmética de todos os valores de RCS do objeto refletor.
Desvio de alvo II (Swerling II Target)
O alvo Swerling II é semelhante ao Swerling I, usando a mesma equação, exceto que os valores do RCS mudam mais rapidamente e variam de pulso para pulso adicionalmente.
Os casos Swerling I e II aplicam-se a um alvo que é composto por muitos dispersores independentes de áreas aproximadamente iguais, como aviões. No entanto, no caso Swerling II, não há antena de vigilância rotativa, mas focada em um radar de rastreamento de alvo.
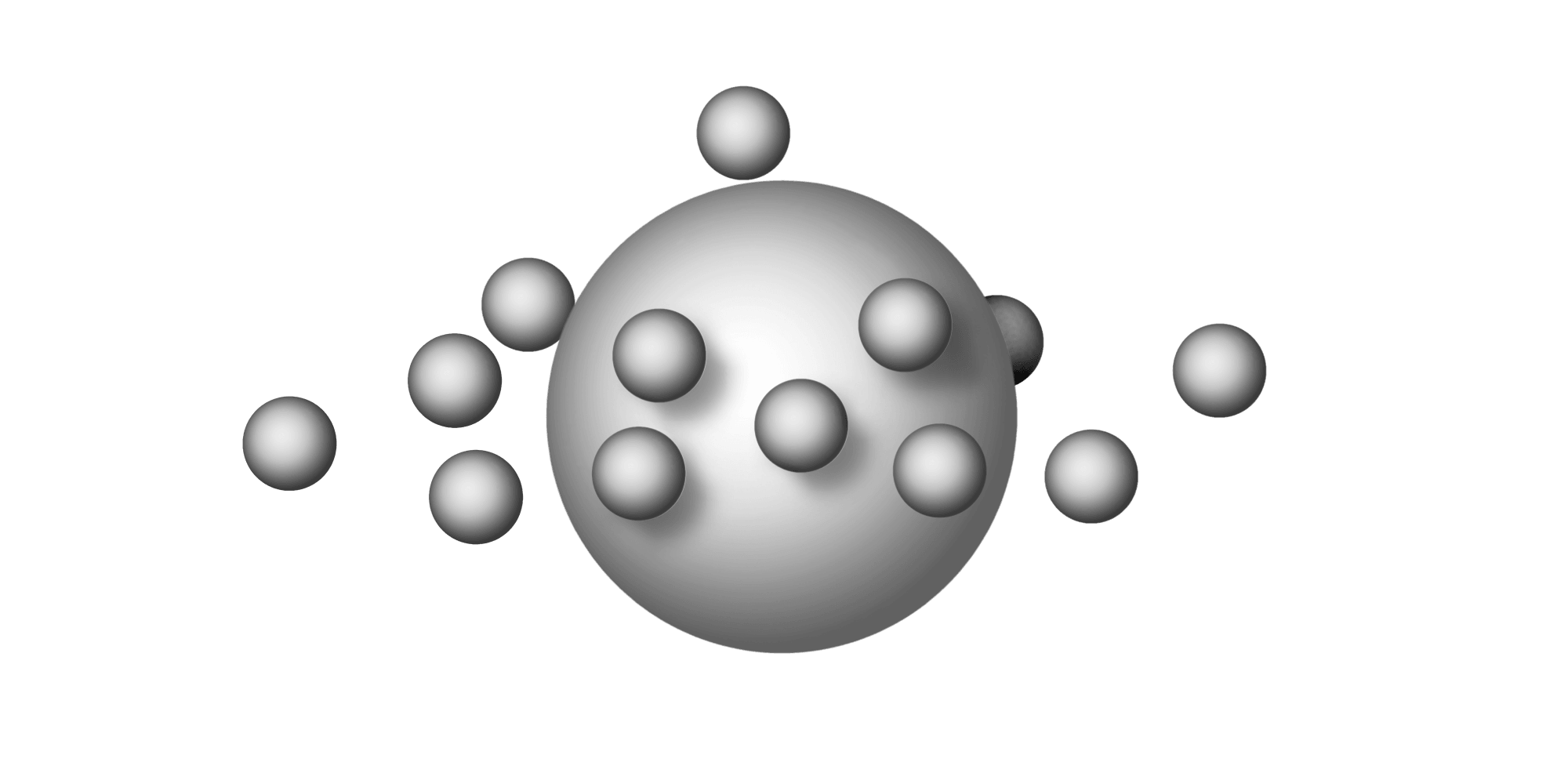
Figura 3: Swerling III e IV: Um refletor isotrópico dominante é sobreposto por uma pluralidade de pequenos refletores.
Figura 3: Swerling III e IV: Um refletor isotrópico dominante é sobreposto por uma pluralidade de pequenos refletores.
Desvio de alvo III (Swerling III Target)
O alvo Swerling III é descrito como Swerling I, mas com quatro graus de liberdade (m = 2). A flutuação scan-to-scan segue uma densidade de probabilidade:

 (45)
(45)Desvio de alvo IV (Swerling IV Target)
O caso Swerling IV é semelhante ao Swerling III, mas o RCS varia de pulso para pulso, em vez de varredura para varredura e segue a Eq. 45.
Os casos III e IV aproximam um objeto com uma grande superfície de dispersão com várias outras pequenas superfícies de dispersão. Este pode ser o caso de navios. Swerling mostra em sua publicação que uma perda adicional de flutuação depende mais da probabilidade de detecção e menos da probabilidade de alarmes falsos PN.
Dados os valores do alcance teoricamente máximo de um conjunto de radar de rastreamento são baseados no modelo de alvo Swerling II e IV frequentemente. A perda de flutuação de um alvo estável é com o valor típico de 1 a 2 decibéis relativamente pequeno, com uma probabilidade de detecção PD=60%.

Figura 4: Perda de flutuação Lf para os casos Swerling I e III

Figura 4: Perda de flutuação Lf para os casos Swerling I e III
Os casos I e III se aplicam a radares de busca. A perda de flutuação depende da probabilidade de detecção e é mostrada na Figura 4. Há um ganho de flutuação para um PD<30%. Isso ocorre enquanto a mudança estatisticamente da magnitude supera as pequenas relações sinal-ruído.
Desvio V (Swerling V Target)
O caso Swerling V é um valor de referência com uma seção transversal constante do radar (também conhecido como Swerling 0). Descreve um alvo idealizado sem qualquer flutuação.
Fonte:
- Swerling: ''Probability of Detection for Fluctuating Targets'' Rand Research Memorandum RM-1217, March 17, 1954