Загуба от колебания
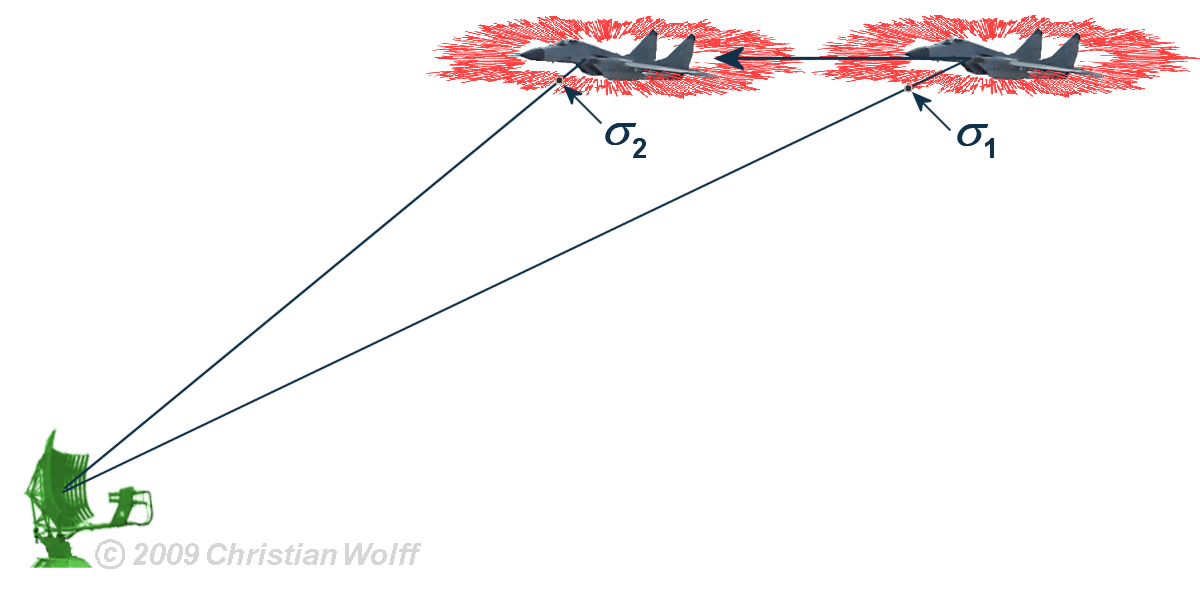
Изображение 1: Причина за колебанията на отразения сигнал

Загуба от колебания
Диаграмата на вторичната обратна радиация на реални летателни цели (ефективна отразяваща повърхност) има многократно разтеглен, силно назъбен характер. Колебанията на отразения сигнал се основават на тази сложна диаграма на относителната площ на обратното разсейване. Когато се движи напред, моделът на обратния лъч на въздухоплавателното средство се завърта спрямо радара. Не е възможно да се предвиди кой ъглов сегмент от тази диаграма е в сила във всеки един момент. Поради времевите промени на амплитудите и фазовите промени, предизвикани от курса на целта, приетата интензивност на полето в радарната установка е подложена на силни колебания, които се наричат флуктуации.
За математическото описание на влиянието на колебанията върху обхвата на радара през 1954 г. Питър Свърлинг определя четири моделни случая. Приема се, че характеристиката на антената е правоъгълна, т.е. пренебрегва се модулацията на амплитудите на ехото от характеристиката на антената.
Четирите моделни случая («случаи на Свърлинг»)
В своята работа Свърлинг показва, че колебанията на целта внасят допълнителни загуби от колебания L f в уравнението на радара. Те зависят силно от вероятността за откриване PD, но съвсем слабо от вероятността за фалшива тревога PN. (Забележка: В литературата четирите модела кутии понякога са номерирани с римски цифри).
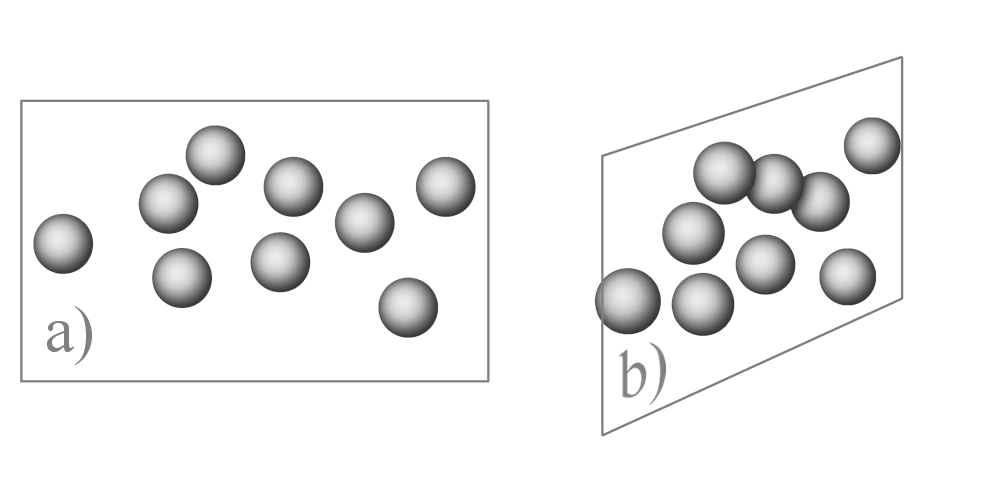
Изображение 2: Swerling 1 и 2: целта се състои от няколко изотропни отражателя с еднакъв размер, разположени върху повърхност. От различен ъгъл на същото разположение (изглед b) се получават различни разстояния и следователно различни смущения.
Изображение 2: Swerling 1 и 2: целта се състои от няколко изотропни отражателя с еднакъв размер, разположени върху повърхност. От друг ъгъл на същото разположение (изглед b) се получават други разстояния и съответно други условия за суперпозиция.
Случай 1:
Амплитудите на ехото остават постоянни по време на преминаването на антената над целта, т.е. по време на престоя на целта или времето за осветяване Td. Големината им обаче се променя от проба до проба по статистически независим начин, т.е. амплитудите са различни в последователните проби и не са корелирани.
Този модел се нарича флуктуация от сканиране до сканиране (scan-to-scan fluctuation, тук: от оборот до оборот). Разпределението на вероятността на плътността на ефективна отразяваща повърхност σ се задава от разсейването на Рейли, а сумата на ефективна отразяваща повърхност се разпределя експоненциално.

 (44)
(44)
Където стойност нa σaverage е средната стойност на всички възникнали сечения на обратното разсейване.
Този случай характеризира поведението на цели, състоящи се от много независими обратно излъчващи елементи с приблизително еднакъв размер. Това важи например за въздушни цели. Радарът е въздушен разузнавателен радар или разузнавателен радар на морската повърхност с относително бързо въртящо се покритие.
Случай 2:
Законът за флуктуациите отново е даден с уравнение (44), но флуктуациите са много по-бързи. Резултатът е промяна на амплитудата от импулс до импулс (флуктуация от импулс до импулс) в рамките на n ехо-сигнала за времето на осветяване.
Подобно на случай 1, случай 2 характеризира статистическото поведение на ехо-сигналите от въздухоплавателни средства. Тук обаче не става въпрос за въртяща се антена за въздушно наблюдение, а за радар за проследяване на цели, фокусиран върху цел.
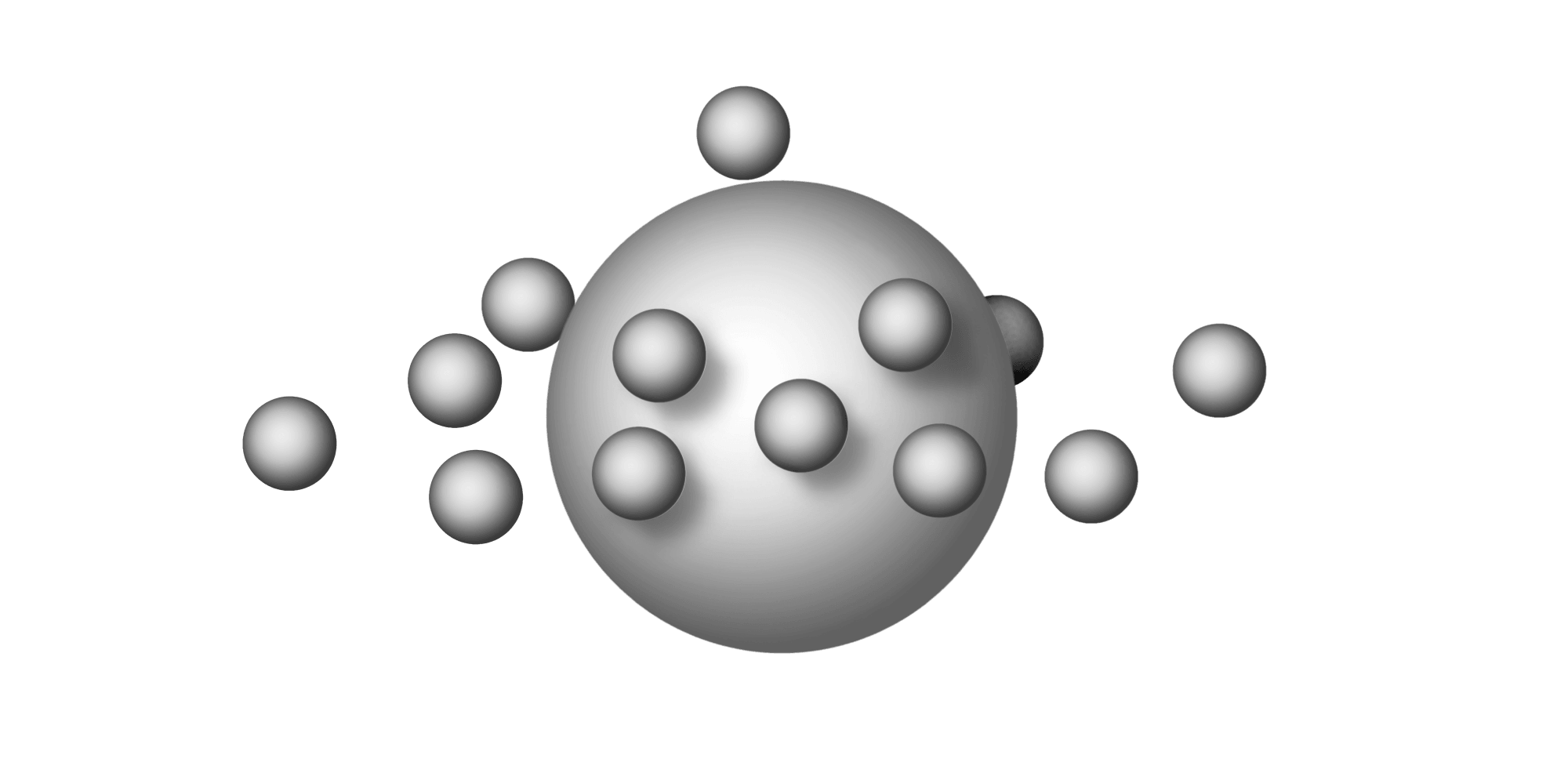
Изображение 3: Swerling 3 и 4: доминиращ изотропен рефлектор е покрит от няколко малки рефлектора.
Случай 3:
Флуктуацията се проявява от проба до проба, както в случай 1, но според разпределението на плътността на вероятността

 (45)
(45)
Случай 4:
Общата ефективна светлоотразяваща площ σges
съответства на разпределение на χ².
Колебанията се проявяват както в случай 2 от импулсен период до импулсен период, но разпределението на плътността на вероятността следва уравнение (45).
Случаи 3 и 4 описват поведението на цели, при които по-голяма зона на обратно разсейване се наслагва върху някои по-малки или при които голяма зона на обратно разсейване леко променя своя аспект. Те вероятно ще се прилагат основно за корабни цели.
На практика случаи 2 и 4 са сравнително малко интересни, тъй като бързите колебания от импулс до импулс изискват или скорости на целта, значително по-високи от тези на самолета, или дълго време за престой на целта. Такива специални случаи може да има в радарите за проследяване за противоракетна отбрана или в радарите за артилерийско разузнаване. Тъй като в тези случаи в рамките на ехоимпулса вече се извършва известно осредняване на различните амплитуди, загубите от флуктуации, свързани със стабилна цел, са относително малки. Средно те възлизат само на 1 до 2 dB при вероятност за откриване PD от над 60%.

Изображение 4: Загуба от флуктуации L f за случаи 1 и 3 на Свърлинг

Изображение 4: Загуба от флуктуации L f за случаи 1 и 3 на Свърлинг
Случаи 1 и 3 са по същество верни за радарите за търсене. Загубата на флуктуации като функция на вероятността за откриване PD е показана на Изображение 4. При PD<30% се наблюдава увеличаване на флуктуациите, тъй като при много малки съотношения сигнал/шум статистическите амплитудни промени са в полза на откриването.
Случай 0 или 5:
Впоследствие това дело е прието за референтно. Това е синтетична цел без никакви колебания.
Източник:
- Swerling: ''Probability of Detection for Fluctuating Targets'' Rand Research Memorandum RM-1217, 17 März 1954