Co je falešný poplach?
Míra falešných poplachů
Šumové signály se vyskytují se statisticky rozloženými amplitudami, které odpovídají amplitudám užitečných signálů, a jako takové se zpracovávají. To vede k zobrazení „falešných cílů”. Míra falešných poplachů je průměrný počet „falešných cílů”, které mohou být detekovány na výstupu přijímače za určitou dobu (např. za jedno otočení antény nebo pouze za jednu periodu impulsu). Měla by být co nejnižší. Míru falešných poplachů (FAR) lze vypočítat podle následujícího vzorce:
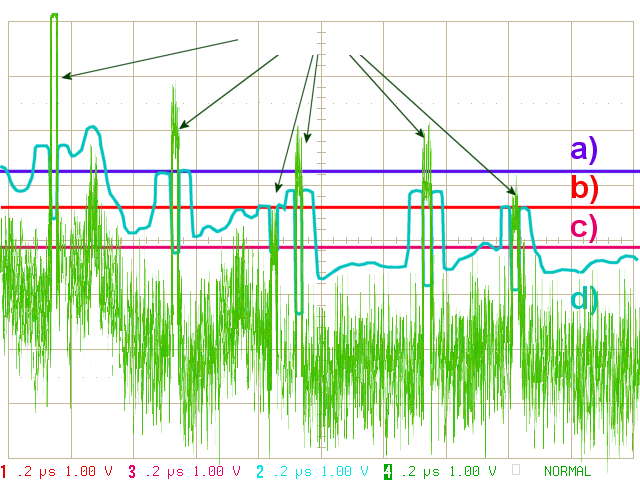
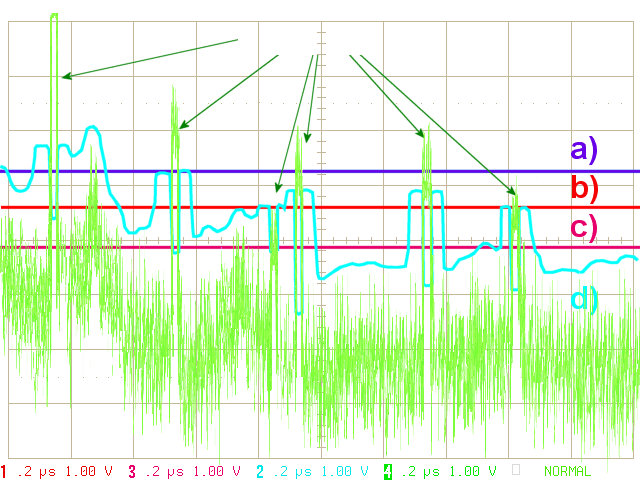
Obrázek 1: Prahové hodnoty při zpracování radarového signálu
{kind=link}
| FAR = | falešné cíle na periodu impulzu | (1) |
| počet buněk rozlišení rozsahu |
Maximální počet falešných cílů je dán počtem možných detekcí cílů. U digitálního radaru je to počet buněk rozlišení rozsahu. (U analogového radaru je maximální počet možných falešných cílů určen poměrem doby příjmu a doby vysílacího impulsu.) Na obrázku 1 je znázorněna perioda impulzu obsahující šest skutečných cílů. Na zobrazovací jednotce se zobrazí pouze ty signály, které překračují příslušnou prahovou hodnotu.
- příliš vysoká prahová hodnota: pravděpodobnost detekce = 66%
- Optimální prahová hodnota: pravděpodobnost detekce = 83%
jeden falešný poplach!
míra falešných poplachů = 1 / 666 = 1,5 ·10-3 ¹) - Příliš nízká prahová hodnota: příliš vysoká míra falešných poplachů!
- Proměnná prahová hodnota: konstantní míra falešných poplachů v celém rozsahu, ale ve srovnání s řádkem b) vyšší pravděpodobnost detekce (detekován je i šestý cíl na snímku).
Další možností, jak získat falešné cíle, je např. výskyt překročení. V praxi se při digitálním zpracování cílů toleruje míra falešných poplachů v řádu 10-4 až 10-3. V případě analogového zobrazení jsou však akceptovány mnohem vyšší hodnoty, protože výběr cíle nakonec provádí inteligentní operátor.
Míra falešného poplachu závisí na úrovni všech rušivých vlivů, jako je šum, ozvěny pevných cílů a rušivé záření do přijímače. Na krátkou vzdálenost převažuje vliv pevných cílů, zatímco na velkou vzdálenost převažuje vliv šumu. Míra falešných poplachů má proto obvykle jiné hodnoty v blízkém dosahu než ve vzdáleném dosahu, ale uvažuje se přinejmenším po celou dobu impulsu.
¹) pro radarovou jednotku s dosahem 100 km a dobou trvání impulsu 1 µs = 666 rangecells.
Konstantní míra falešných poplachů (CFAR)

video vstup
CFAR
b) Velký z: CAGO-CFAR
c) Nejmenší z: CASO-CFAR
Obrázek 2: Princip obvodu CFAR s průměrováním buněk.

video vstup
CFAR
b) Velký z: CAGO-CFAR
c) Nejmenší z: CASO-CFAR
Obrázek 2: Princip obvodu CFAR s průměrováním buněk.
video vstup
CFAR
b) Velký z: CAGO-CFAR
c) Nejmenší z: CASO-CFAR
Obrázek 2: Princip obvodu CFAR s průměrováním buněk.
Princip obvodu pro konstantní míru falešných poplachů poprvé popsali v roce 1968 H. M. Finn a R. S. Johnson.[1]
V blízkém dosahu radaru obvykle dochází k silnému rušení od pevných cílů. Na tuto úroveň je pak dodatečně nanesena úroveň šumu. Pokud je prahovou úrovní konstantní stejnosměrné napětí, je pravděpodobnost falešného poplachu na krátkou vzdálenost mnohem vyšší než na velkou vzdálenost. Zároveň je pravděpodobnost detekce na velkou vzdálenost mnohem horší než na blízkou vzdálenost.
Řešení tohoto problému vede k obvodům, které mohou měnit práh nikoli jako konstantní úroveň, ale jako upravenou funkci vnímaných podmínek prostředí, což vede ke konstantní míře falešných poplachů (CFAR) po celou dobu impulsu. Nyní, když lze lépe potlačit falešné poplachy, ke kterým jinak často dochází na krátkou vzdálenost, zvyšuje se pravděpodobnost detekce cílů na velkou vzdálenost: statisticky se tak zvyšuje dosah radaru.
Cell-Averaging Constant False Alarm Rate (CA-CFAR)
V příkladu na obr. 1 označuje křivka d) přizpůsobený průběh aktuální prahové hodnoty úrovni šumu. Rušení, které by na začátku exkurze vyvolalo falešný poplach i pro prahové napětí a), zde také dosahuje kritické úrovně. Třetí cílová ozvěna, která je tak slabá, že by se ztratila i při optimálním prahu b), se však v CFAR stává spolehlivě detekovaným cílovým signálem.
Obvod na obr. 2 ukazuje zjednodušený princip. Znaménka součtu představují rovnici:

Obrázek 3: Srovnání prahových hodnot různých metod CFAR pro situaci dvou sousedních cílových znaků:
slabší cílový znak je v metodách průměrování buněk zastíněn silnějším znakem.[2]

Obrázek 3: Srovnání prahových hodnot různých metod CFAR pro situaci dvou sousedních cílových znaků:
slabší cílový znak je v metodách průměrování buněk zastíněn silnějším znakem..[2]
 (2)
(2)
V CA-CFAR se toto průměrování provádí také v sestavě „aritmetická logika”.
Skutečnost, že křivka CA-CFAR na obr. 3 vykazuje silné výchylky vlevo a vpravo od cílových znaků, ale má relativně nízkou hodnotu u samotného cílového znaku, lze poměrně snadno vysvětlit z principiálního schématu zapojení (obr. 2). Krátce před cílovým znakem je amplituda cílového znaku zahrnuta do průměrné hodnoty, tj. výrazně zvyšuje prahovou hodnotu. Přesně v testované buňce rozsahu (RUT, někdy také nazývané testovaná buňka, CUT) se do výpočtu nezahrnuje vysoká amplituda cílového znaku. Proto je nyní prahová hodnota náhle mnohem nižší. Poté se tato amplituda opět zohlední a opět zvýší práh. CFAR tak zvyšuje kontrast silných cílových znaků. Velmi slabé cílové znaky však mohou být ztraceny v prostředí rušivého signálu, nikoliv při použití pevného prahu. Jedním ze způsobů, jak tyto ztráty mírně snížit, je nezahrnout do vyhodnocení dva články v blízkosti RUT (v obvodu na obrázku 2 jsou označeny čárkovaně). Tyto nevyužité buňky se pak nazývají strážní buňky. Zbývající buňky se nazývají buňky referenčního okna.
CAGO-CFAR
V Cell-Averaging Greatest Of - Constant False Alarm Rate (CAGO-CFAR) je aritmetická logika rozdělena na větev před testovanou buňkou a větev za ní. Průměrná hodnota se vypočítá v obou cestách zpracování. Pro další zpracování se použije pouze větší z těchto dvou hodnot:

 (3)
(3)
Výhodou systému CAGO-CFAR je nízký výpočetní výkon a relativně nízké ztráty v cíli. V porovnání s CA-CFAR se zlepšilo zvládání nehomogenních prostředí rušivých signálů.
Nevýhodou je stále nízká účinnost a možnost, typická pro všechny varianty CA-CFAR, že se dva sousední cílové znaky mohou navzájem zakrývat (viz obr. 3). Problémy způsobuje také náhlá změna rušivých signálů (například na okraji větších pevných cílových oblastí).
CASO-CFAR
Cell-Averaging Smallest Of- Constant False Alarm Rate (CASO-CFAR) používá stejný obvod jako CAGO-CFAR. Jediný rozdíl je v tom, že místo větší hodnoty výstupního signálu obou zpožďovacích řetězců se nyní používá menší hodnota. Větší úroveň sousedního cílového signálu se proto obvykle pro výpočet prahu nepoužívá. Tím se poněkud snižuje nebezpečí, že by se dva sousední cílové znaky mohly navzájem maskovat.
CAOS-CFAR nebo OS-CFAR
Protože předchozí metody nedokážou stejně ošetřit oba extrémy rušivého prostředí (homogenní a nehomogenní rušivé prostředí), byly vyvinuty metody uspořádané statistiky (OS) v zapojení na obrázku 2 jsou dva logické symboly se znaménkem plus nahrazeny statistickou metodou.[2] Prvním krokem je seřazení všech hodnot podle velikosti. Určitý počet nejvyšších hodnot je z dalšího zpracování vyloučen. Ze zbývajících hodnot lze opět vytvořit průměr (CAOS-CFAR) nebo použít jiné váhy (například v závislosti na průměrné hladině hluku) (OS-CFAR).
Opět lze provést oddělené rozdělení na předcházející a následující buňky. Jejich jednotlivé výsledky lze opět před dalším zpracováním vybrat jako Greatest Of (OSGO-CFAR) nebo Smallest Of (OSSO-CFAR).[3]
Výhodou OS-CFAR je mnohem lepší účinnost prahování. Sousední cílové znaky se již nemohou vzájemně zakrývat. Hlavní nevýhodou je však obrovské výpočetní úsilí, které je třeba vynaložit při zpracování radarových signálů v reálném čase, protože výpočet prahu stále předchází detekci cíle. Doba trvání výpočtu by zde nebyla tak rozhodující, kdyby byla pro každou buňku konstantní. Třídění má však různou dobu výpočtu v závislosti na pořadí dat. To je pro zpracování v reálném čase velmi nepříznivé.
CASH-CFAR
Takzvaná CASH-CFAR (z anglického Cell Averaging Statistic Hofele) je další statistická metoda, kterou vyvinul Franz Xaver Hofele, zaměstnanec bývalé DASA (dnes Hensoldt)[4] a která je založena na sérii sčítacích prvků a speciálním detektoru maxima a minima.[5] Tato metoda dosahuje stejných výhod jako OS-CFAR. Dva sousední cílové znaky se již nemohou vzájemně maskovat. Jejich časové postranní laloky z pulzní komprese jsou spolehlivě maskovány prahem. Díky této metodě lze vynechat časově náročné třídění, takže se výrazně sníží výpočetní náročnost.
MAMIS-CFAR
MAMIS-CFAR (MAximum MInimum Statistic) je v podstatě stejný jako CASH-CFAR. Sčítací prvky v CASH-CFAR jsou zde nahrazeny speciální formou detektoru maxima a minima (například jako součást FPGA).
Inverzní míra falešných poplachů
Ve statistice se také často používá inverzní míra falešných poplachů (IFAR). Lze ji vypočítat podle rovnice (1) a poté převrátit. Další způsob výpočtu je v čase:
| IFAR = | 1 | = | T | = T·Btx | s | FAR = míra falešných poplachů T = průměrný interval mezi dvěma vysílacími impulsy. Λ = doba trvání falešného poplachu Btx = šířka pásma vysílacích impulsů |
(4) |
| FAR | Λ |
U jednoduchého pulzního radaru je doba trvání falešného poplachu Λ rovna době trvání vysílacího pulzu τ. U radaru s vnitropulsní modulací lze dobu trvání falešného poplachu měřit až po kompresi pulzu. Z tohoto důvodu existují také výpočty, při nichž se šířka pásma vysílacích impulsů Btx používá jako míra rychlosti komprese impulsů a také jako možné rozlišení dosahu.
Sources and ressorces:
- H. M. Finn and R. S. Johnson, ”Adaptive detection mode with threshold control as a function of spacially sampled clutter-level estimates;” RCA Rev., vol. 29, pp. 141-464, September 1968.
- Rohling, Hermann ”Ordered statistic CFAR technique - an overview”, Radar Symposium (IRS), 2011 Proceedings International, On page(s): 631 - 638, Volume: Issue:, 7-9 Sept. 2011
- Long Cai, Xiaochuan Ma, Qi Xu, Bin Li, Shiwei Ren ”Performance Analysis of Some New CFAR Detectors under Clutter”, Journal of Computers, Vol 6, No 6 (2011), 1278-1285, Jun 2011 (doi:10.4304)
- F. X. Hofele, ”An innovative CFAR algorithm,” in Proc. CIE Int. Conf. Radar, 2001, pp. 329–333.
- Patent DE 19600779 A1 Verfahren zur Erzeugung einer Clutter-Schwelle und Anordnungen zur Durchführung des Verfahrens