Противоречие между предельно достижимыми параметрами радиолокатора (неопределенность Допплера)
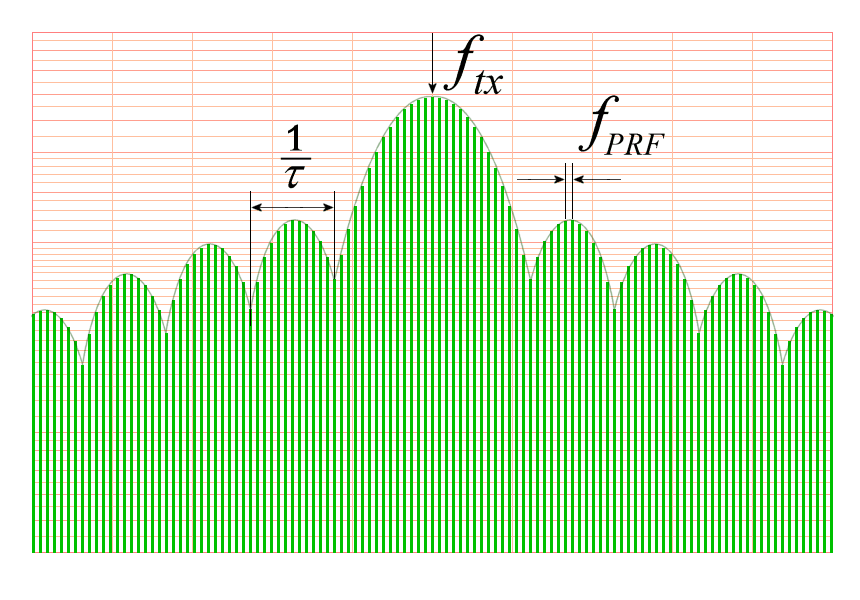
Рисунок 1. Вид радиолокационного сигнала на экране анализатора спектра

Противоречие между предельно достижимыми параметрами радиолокатора (неопределенность Допплера)
В импульсном радиолокаторе колебание на несущей частоте модулируется по амплитуде периодической последовательностью прямоугольных импульсов. Частотный спектр излучаемого сигнала представляет собой гребенчатый линейчатый спектр (Рисунок 1). Интервал между спектральными линиями равен частоте повторения импульсов fPRF или PRF. Эти линии не могут быть отделены простым амплитудным сравнением. Спектр принятого эхо-сигнала (с учетом смещения несущей частоты, вызванного эффектом Допплера) может использоваться для однозначного измерения скорости цели только тогда, когда допплеровский сдвиг не превышает интервала между спектральными линиями. Таким образом, однозначное измерение скорости цели возможно при условии, что частота Допплера меньше частоты повторения импульсов или, что эквивалентно, частота повторения импульсов должна быть больше частоты Допплера.
Поскольку электромагнитные волны распространяются с конечной скоростью (скоростью света) импульсному радиолокатору требуется определенное время для обнаружения объектов, находящихся на больших дальностях. Это время равно времени, за которое зондирующий сигнал радиолокатора достигнет цели и вернется к приемной антенне. Когда межимпульсный интервал (период повторения импульсов) достаточно большой проблем не возникает. Если же он уменьшается, то может возникать ситуация, когда время, требуемое для распространения электромагнитной волны до цели и обратно, будет больше, чем период повторения импульсов. Другими словами, отраженный целью сигнал поступит в радиолокатор уже после начала следующего зондирования. Это приведет к тому, что будет измерена ошибочная (неоднозначная), значительно меньшая, дальность цели. Поэтому радиолокаторы дальнего обнаружения имеют малые частоты повторения импульсов (PRF). Напротив, допплеровские радиолокаторы, обеспечивающие однозначное измерение скорости цели в большом диапазоне, оперируют высокими частотами повторения импульсов (PRF).
Противоречие между предельно достижимыми параметрами радиолокатора (так называемая, дилемма Доплера) состоит в том, что выбор частоты повторения зондирующих импульсов, являющийся хорошим для достижения большого значения однозначно измеряемой дальности, будет плохим выбором для достижения большого значения однозначно измеряемой скорости, и наоборот.
Используя общее выражение для частоты Допплера, мы можем вычислить однозначно определяемую радиальную скорость vr:
| fPRF > |fD| = | 2 · vr · ftx | (1) |
| c0 |
| vr < | c0 · fPRF | (2) |
| 2 ftx |

Рисунок 2. Зависимость одновременного однозначного измерения дальности и скорости цели от частоты

измеряемая скорость (м/с)
измеряемая дальность (км)
Рисунок 2. Зависимость одновременного однозначного измерения дальности и скорости цели от частоты
Это выражение справедливо, если известно направление допплеровского сдвига частоты, то есть известно в каком направлении двигается цель: к радиолокатору или от него. Если это направление неизвестно, то однозначно измеряемое значение скорости уменьшается еще вдвое:
| vr < | c0 · fPRF | (3) |
| 4 ftx |
Частота повторения импульсов является также и мерой однозначно измеряемой дальности. Если длительность зондирующих импульсов намного меньше периода их повторения, то частота повторения импульсов fPRF может быть выражена как c0 /2·Rmax:
| Rmax · vr < | c02 | (4) |
| 8 ftx |
Теперь мы видим, что способность радиолокатора одновременно однозначно измерять дальность и частоту Допплера (то есть радиальную скорость) цели зависит только от значения несущей частоты излучения (Рисунок 2).