Що таке однозначність вимірювання дальності?
Максимальна дальність, що однозначно вимірюється.

Рисунок 1. До пояснення ефекту неоднозначного вимірювання дальності
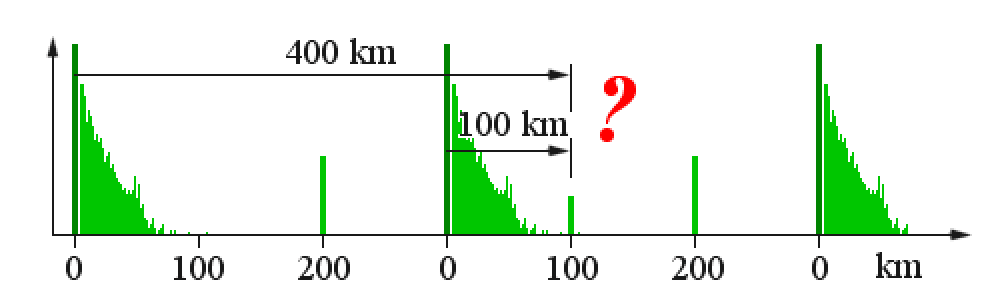
Рисунок 1. До пояснення ефекту неоднозначного вимірювання дальності
Максимальна дальність, що однозначно вимірюється.
Як відомо, основним методом, який використовується в радіолокаторах для вимірювання дальності до цілі, є імпульсний метод. У основі цього методу полягає вимірювання часу запізнення відбитого від цілі імпульсу (сигналу відлуння) відносно моменту його випромінювання, тобто, відносно зондувального імпульсу. Таким чином, обов’язковою умовою коректного функціонування даного методу є оброблення сигналу відлуння в парі зі «своїм» зондувальним імпульсом. Однак під час роботи радіолокатора зондувальні імпульси слідують один за одним через період зондування, і може виникнути ситуація, коли сигнал відлуння, спричинений i-м зондувальним імпульсом, надійде до приймача вже після того, як буде випромінений наступний (i+1)-й , зондувальний імпульс. Очевидно, що це призведе до помилкового вимірювання часу запізнення відбитого імпульсу i, відповідно, дальності до цілі. У подібних ситуаціях говорять про неоднозначність вимірювання дальності цілі.
Сутність виникнення ефекту неоднозначного вимірювання дальності пояснюється на Рисунку 1, де зображена розгортка дальності індикатора радіолокатора. Зондувальні імпульси відповідають нульовій дальності і слідують з періодом, який дорівнює часу розповсюдження електромагнітної хвилі на дальність 300 кілометрів і назад. Крім них, на рисунку показані сигнали відлуння від двох цілей: на дальності 200 кілометрів і на дальності 400 кілометрів.
Сигнал відлуння від першої цілі має час запізнення, менший за період зондування, і тому неоднозначність вимірювання дальності не виникає, оскільки сигнал відлуння легко ідентифікується як відбиття від цілі першого зондувального імпульсу.
Сигнал відлуння від другої цілі має час запізнення, більший за період зондування. У такому випадку виникає неоднозначність вимірювання дальності, оскільки без додаткової інформації неможливо визначити, яким зондувальним імпульсом спричинено відбитий імпульс – першим або другим. Дальність, що вимірюється відносно другого зондувального імпульсу, буде хибною. З рисунку видно, що виміряне значення дальності другої цілі дорівнює 100 кілометрам, тоді як її реальне значення дорівнює 400 кілометрам.
Узагальнюючи проведені міркування, можна виділити такі можливі співвідношення між значеннями часу запізнення t сигналу відлуння та періоду зондування Т:
- t < T – сигнал відлуння надходить до моменту випромінювання наступного зондувального імпульсу;
- t = T – сигнал відлуння надходить у момент випромінювання наступного зондувального імпульсу, що призводить до неможливості вимірювання, оскільки приймач радіолокатора в цей час закритий;
- t > T – сигнал відлуння надходить після випромінювання наступного зондувального імпульсу, що призводить до неоднозначності вимірювання дальності.
Отже, максимальна дальність, яку можливо однозначно виміряти імпульсним методом (максимальна однозначно вимірювана дальність) Rmax – це максимальна дальність, для якої виконується умова t < T.
З урахуванням того, що до моменту закриття приймача на час випромінювання зондувального імпульсу повинен відбутися прийом відбитого сигналу повної тривалості, вираз Rmax може бути представлений у вигляді:
.print.png)
.png)
(1)
- c0 – швидкість поширення електромагнітної хвилі [м/с];
- T – період слідування зондувальних імпульсів [с];
- τ – тривалість зондувального імпульсу [с].
Дільник «2» у формулі (1) відповідає проходженню зондувальним імпульсом шляху від радіолокатора до цілі і назад.
Якщо тривалість зондувального імпульсу набагато менша за період зондування радіолокатора, то нею можна знехтувати. З урахуванням цього формула для максимальної однозначно вимірюваної дальності для будь-якого імпульсного радіолокатора набуде вигляду:
.print.png)
.png)
(2)
- fp – частота повторення зондувальних імпульсів [Гц або с-1]
З формули (2) випливає, що чим вище частота повторення імпульсів fp або, що еквівалентно, чим менше період зондування, тим менше значення максимальної однозначно вимірюваної дальності Rmax.
Слід зазначити, що значення Rmax має бути більше, ніж максимальна дальність відображається на індикаторі радіолокатора (так звана «інструментальна дальність», «приладова дальність»).
Розглянемо радіолокатор із частотою повторення імпульсів fp = 1 000 Гц.
Тоді період зондування, як величина зворотна частоті повторення імпульсів, дорівнює T = 1/fp = 1/1000 = 1мс..
Відповідно до формули (2) максимальна однозначно вимірювана дальність становитиме:
Rmax = (3·108·1·10-3)/2 = 1,5·105 м = 150 км.
Питання: якщо радіолокатор приймає сигнал відлуння від цілі з часом запізнення 100 мкс,
чи можливо вважати виміряну дальність цілі однозначною?
Відповідь: питання поставлене некоректно.
Сигнал відлуння з часом запізнення 100 мкс може надійти від цілі з дальності як 15 км, так і 165 км.
Однозначний результат можна отримати сформулювавши питання у зворотному порядку, тобто, щодо дальності цілі, а не часу запізнення.
Тоді відповідь буде такою: дальність цілі 15 км для даного радіолокатора є однозначно вимірюваною дальністю
і запізнення сигналу відлуння в цьому випадку становитиме 100 мкс.
Таким чином, період зондування є важливим параметром, який слід враховувати під час обробки результатів вимірювання дальності цілі радіолокаційним способом або при побудові алгоритмів вимірювання дальності. Причина полягає в тому, що якщо час запізнення сигналу відлуння буде більшим за період зондування, то відмітка цілі буде відображатися в хибному місці (на хибній дальності) індикатора.

Рисунок 2. До пояснення результату використання воббуляції періоду зондування

Рисунок 2. До пояснення результату використання воббуляції періоду зондування
Рисунок 2. До пояснення результату використання воббуляції періоду зондування
Воббуляція періоду зондування
Для усунення можливої неоднозначності вимірювання дальності застосовують воббуляцію (от англійського to wobble – хитати, качати) періоду зондування – стрибкоподібну зміну його значення. У цьому випадку відмітки від цілі, яка знаходиться на однозначно вимірюваної дальності, відображатимуться на індикаторі в тому самому місці. Якщо ж дальність цілі перевищує значення максимальної однозначно вимірюваної дальності, то відмітки такої цілі постійно зміщуватимуться (Рисунок 2) і відображатиметься не одна, а декілька відміток. Така ознака використовується в алгоритмах обробки сигналів для усунення неоднозначності вимірювання дальності.
Для прикладу на Рисунку 3 зображені відмітки цілей на екрані первинного радіолокатора. Товста коротка дужка є відміткою цілі, а тонка і довша дужка – відміткою сигналу відповідача системи розпізнавання державної належності (наземного радіолокаційного запитувача, НРЗ). Також на індикаторі видно сигнали відповідача цілі, що знаходиться на дальності, більшій за максимальну однозначно вимірювану дальність для даного радіолокатора, при використанні воббуляції періоду зондування. З рисунка випливає, що НРЗ не використовує кожен синхроімпульс первинного радіолокатора.
Кількість неоднозначних сигналів відповіді системи розпізнавання може бути зменшено зниженням потужності передавача НРЗ. У разі використання зондувань з постійним періодом можна очікувати, що відмітки неоднозначних сигналів відлуння стануть схожі на відмітки цілей, що знаходяться на однозначно вимірюваних дальностях, тобто матимуть вигляд дужок.

дальності
Рисунок 3. Вигляд індикатора кругового огляду радіолокатора в режимі воббуляції періоду зондування (зеленою стрілкою показана відмітка цілі на однозначно вимірюваної дальності, що складається з відмітки сигналу відлуння первинного локатора і відмітки НРЗ; червоною стрілкою показані відмітки НРЗ від цілі, що знаходиться за межами однозначно вимірюваної дальності)

дальності
Рисунок 3. Вигляд індикатора кругового огляду радіолокатора в режимі воббуляції періоду зондування (зеленою стрілкою показана відмітка цілі на однозначно вимірюваної дальності, що складається з відмітки сигналу відлуння первинного локатора і відмітки НРЗ; червоною стрілкою показані відмітки НРЗ від цілі, що знаходиться за межами однозначно вимірюваної дальності)
однозначній
дальності
відгук
Рисунок 3. Вигляд індикатора кругового огляду радіолокатора в режимі воббуляції періоду зондування (зеленою стрілкою показана відмітка цілі на однозначно вимірюваної дальності, що складається з відмітки сигналу відлуння первинного локатора і відмітки НРЗ; червоною стрілкою показані відмітки НРЗ від цілі, що знаходиться за межами однозначно вимірюваної дальності)
Винятки
Більш сучасні трикоординатні радіолокатори з фазованими антенними решітками (наприклад, AN/FPS-117 ) є стійкими до неоднозначності вимірювання дальності цілі. Системний комп’ютер керує променем антени у такий спосіб, що сигнал відлуння від цілі, яка знаходиться на неоднозначній дальності, не приймається, оскільки у наступному періоді зондування промінь буде спрямовано вже у іншому напрямку.
Якщо у радіолокаторі використовуються внутришньоімпульсна модуляція або різна форма зондувальних імпульсів, то проблема однозначності вимірювання дальності також перестає бути актуальною. В даному випадку для кожного прийнятого сигналу відлуння можливо точно визначити його вихідний зондувальний сигнал.
Радіолокатори, встановлені на супутниках дистанційного зондування Землі, зазвичай виконують вимірювання на дальностях, які виходять далеко за межі максимальних однозначно вимірюваних дальностей. Однак висота орбіти супутника відома і тому завжди можна визначити, в якому періоді зондування надійде сигнал відлуння. У такому разі завдання зводиться до визначення певного порівняно невеликого прирощення дальності відносно відомої висоти орбіти супутника. Якщо скористатися прикладом, зображеним на Рисунку 1, то істинна дальність до цілі (об’єкта на поверхні Землі) становить 400 кілометрів, а вимірюватися вона буде запізненням сигналу відлуння, що надійшов у другому періоді зондування.