Doppler Frekansın Yayılması

yönü
Resim 1: Uçağın ilerlemesi sırasında sabit hedeflerin Doppler frekansı

yönü
Resim 1: Uçağın ilerlemesi sırasında sabit hedeflerin Doppler frekansı
Doppler Frekansın Yayılması
Radar sabit iki nokta yanından (B den A ya doğru) geçtiğinde alınan yankı işaretlerindeki Doppler frekansı zamana bağlı olarak yaklaşık doğrusal bir biçimde değişir. Bir noktada, platformun radyal hızı sıfır olduğunda, Doppler frekansı da sıfır olur. Ardından artmaya başlar, ancak bu kez bir negatif değer ile. Doppler frekansı bir kuş cıvıltısını (chirp) andırır. Doppler frekansın bant genişliği (burada beklenen tüm Doppler frekans bölgesi) A ve B noktalarındaki en uç değerler arasında bulunan bölgedir. Dar açıklık açıları için bu değer:
| fD1 - fD2 = | 2v · φa | v = Platformun yere göre hızı φa = −3 dB için açıklık açısı λ = Radarın dalga boyu. |
(1) |
| λ |

Resim 2: Hareket eden bir platformda (burada 100 m/s) geliş yönüne bağlı olarak yerden parazit yankılarının Doppler frekansı

Resim 2: Hareket eden bir platformda (burada 100 m/s) geliş yönüne bağlı olarak yerden parazit yankılarının Doppler frekansı
Platformun hareketi nedeniyle sabit hedeflerden gelen yankılar bir Doppler frekans içeriği kazanırlar. Platform sabit bir hızla hareket etse dahi bu Doppler frekans içeriği sabit değildir, fakat açısal değişime (ve bunun bir sonucu olan radyal hızın değişimine) bağlı olarak farklı değerler alır. Sadece platformdan çok büyük yanal uzaklıklarda Doppler frekansın yaklaşık doğrusal olarak değiştiği kabul edilebilir.
Yeryüzünde bulunan sabit hedefler, radar platformunun uçuş rotasına olan uzaklığına bağlı olarak Doppler frekanslarında karakteristik bir değişim sürecine sahiptir. Bu yörüngeden uzaklaştıkça Doppler frekansının bant genişliği de o kadar daralır. Hatta bu bant genişliği esas alınarak uzaklık yeniden hesaplanabilir. Uzaklığı bu şekilde hesaplayarak ve yatık menzilin kat edilmesi için geçen süre ölçülerek yer yüzeyinin üç boyutlu bir resmini de çıkarmak mümkündür.
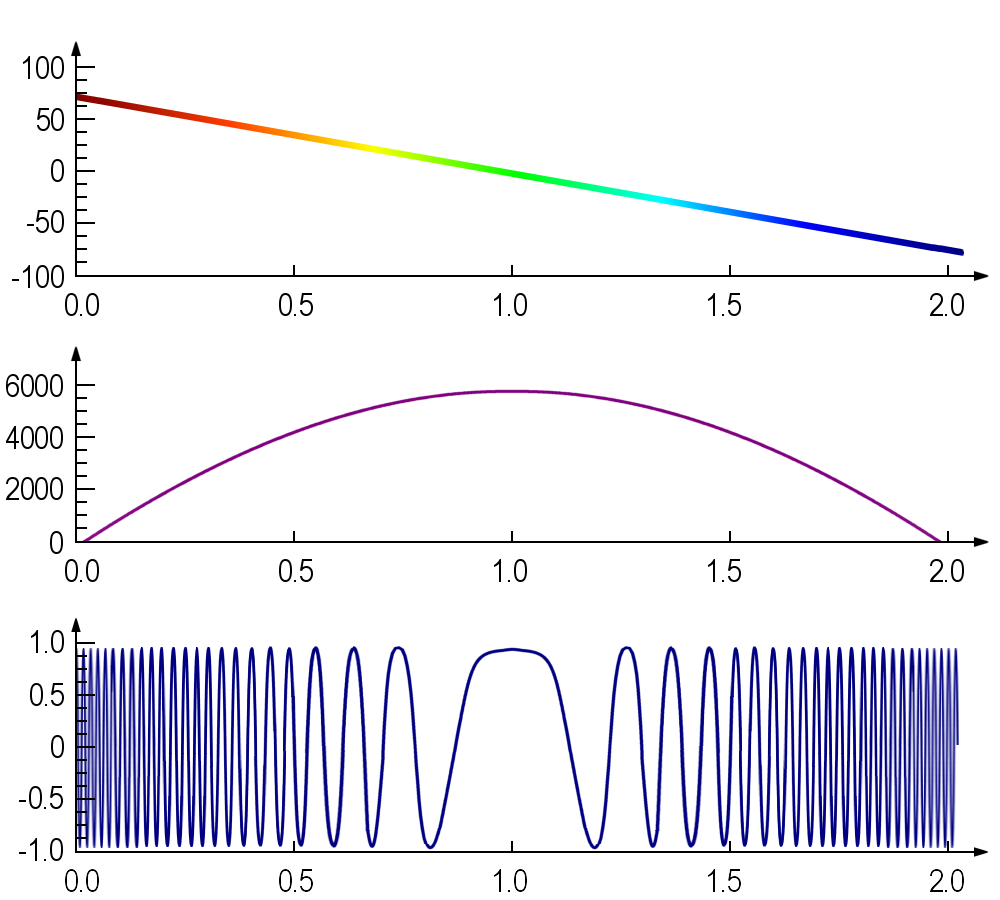
Resim 3: Bir nokta hedefe ait azimut işaretinin frekans-, faz- ve genliğinin akış çizgesi

Resim 3: Bir nokta hedefe ait azimut işaretinin frekans-, faz- ve genliğinin akış çizgesi
Yapay Açıklıklı Radarlarda hareketli hedefler
Yapay Açıklıklı Radarın işaret işlemcisi arazi üzerindeki yansıtıcı noktaların ölçüm süresi boyunca hareket etmediği varsayımı ile işlem yapar. Görülebilir arazi üzerindeki her nokta, farklı Yapay Açıklıklı Radarın konumlarından gelen faz açısı tepkisindeki benzersiz değişiklik ile karakterize edilir. Bu benzersizlik özelliği sayesinde tersi yönde, yani faz açı değişiminden yola çıkılarak, yansıtıcı nesnenin konumu da belirlenebilir. Ancak bu koşul uçuş yolunun solu ve sağındaki simetrik her iki nokta için de geçerlidir.
Eğer bu faz akışı, üzerinde çalışılan hedefin hareketi nedeniyle meydana gelen bir faz kayması ile binişirse, hedefin bu hareketinin yön ve hızı gibi bazı özelliklerine bağlı olarak bir takım olgular meydana gelir. Bu olgular, hedefin konumunun basitçe bir kaymasından, hedef işaretinin hatlarının birbirine karışarak tümüyle anlaşılmaz bir resim görüntülenmesine kadar değişebilir. Bu olgulara radar haritalarında sıkça rastlanır; örneğin en büyük hızında seyretmekte olan bir gemi, burnunun yardığı dalganın birkaç on metre yanında veya gitmekte olan bir tren, demiryolunun üzerinde değil yanında görüntülenebilir. Hareket etmekte olan bu hedefler Doppler frekansın zaman içindeki değişimi izlenerek analiz edilebilir ve keskin piksellere sahip bir resim elde edilebilir. Bu aynı zamanda, hareketli hedeflerin arka planda kalan sabit piksellerden ayırt edilmesini ve böylece rotasına ve hızına bağlı olarak konum kaymasının düzeltilmesini mümkün kılar.