Dönüş Bildirici

Resim 1: Bir dönüş bildirici (rotary encoder) bir minyatür üç fazlı motora benzer (çapı: 1½ inç)

Dönüş Bildirici
Dönüş bildirici (synchro) yapı olarak bir üç fazlı elektrik motoruna benzemesine rağmen işlevini en iyi niteleyen ad „Dönüş Bildirici Transformatör“ adıdır. Anten platformlarının azimut açısal konumunu bildirmek için kullanılır.

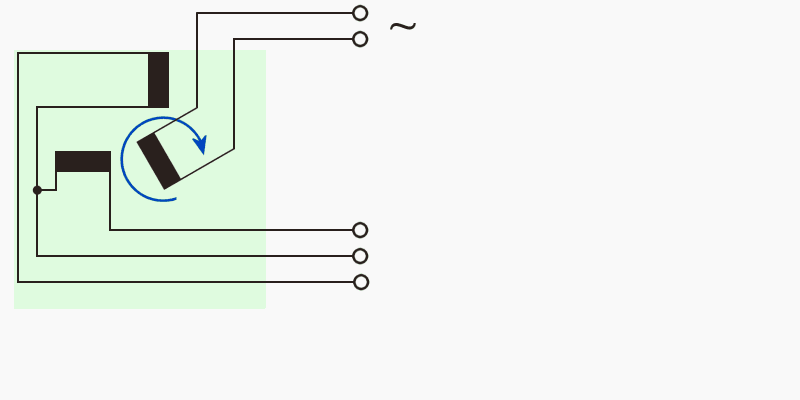
Resim 2: Dönüş bildirici sistemindeki belirteç devresi (indicator circuit)

alıcısı
göndericisi
Resim 2: Dönüş bildirici sistemindeki belirteç devresi (indicator circuit)
Rotor bir gerilim kaynağından beslenir (çoğunlukla URef = 110 V, 400 Hz) ve 120° açı farkıyla yerleştirilmiş, verimliliği karşılık gelen stator sargısının o anki açısına bağlı olarak bir transformatör oluşturur. Bu sebeple üç genliğin birbirlerine oranı o anki açı değerine bağlıdır. Alıcının rotoru şimdi tam olarak en küçük direncin sağlandığı açıya manyetik olarak döner.
Maalesef bu basit düzen her zaman kullanılmaz. Bu tür bağlantı daha ziyade dönerken fazla mekanik dirençle karşılaşmayan ibreli tip aletler için uygundur. Aksi takdirde mekanik kuvvetin bir servo motor tarafından yükseltilmesi gerekir.
Servo motor bulunan bir Dönüş Bildirici Sistemde yine aynı prensip kullanılır. Sistem, en küçük hata gerilimini üreten açıyı alır

Resim 3: Servo devresindeki dönüş bildirici sistem

Hata işareti yükselteci, hata işaretini demodüle etmek için besleme gerilimini alır. Eşzamanlı motor (synchronous motor) en küçük hata gerilimi alınana kadar Dönüş Bildirici Alıcısına kumanda eder ve mekanik sistemi açı bilgisine uygun olarak çevirir. Bağlı devrenin (senkro alıcı) besleme gerilimi bir hata gerilimi olarak alınır, yükseltilir ve servo motora beslenir. Servo motor daima hata gerilimi en az değere inene kadar rotoru döndürür. Kontrol dönüş kumanda aygıtları (servo) topçu bataryaları, radar antenleri ve füze rampaları gibi ağır yükleri çevirmekte kullanılır.
Eğer yollanacak verilerin kapsadığı aralık küçük ise tek hızlı sistemler yeterli hassasiyeti sağlar. Yok, eğer veriler geniş aralıkta bulunuyor ve sistem duyarlılığı çok önemli ise, o zaman tek hızlı sistem yetersiz kalır ve daha uygun bir sistemin kullanılmasını gerekir. Tek-hızlı sistemin 1-hızdan 36-hıza yükseltilmesi ile daha fazla duyarlılık sağlanır. Bir temel çift-hızlı dönüş bildirici sistem iki verici ve iki alıcıdan meydana gelir. Bu sistemin iki hızı sıkça hızlı ve yavaş, yüksek ve alçak veya en çok ince ve kaba olarak adlandırılır. Sıkça servo sistemin hassasiyetini arttırmak için, birisi 1:25 veya 1:36 dişli aktarım oranlarından biri ile çalışan hassas kanal, 1:1 oranlı bir kaba kanalın hata gerilimi ile örtüştüğü iki sistem kullanılır.
Çözücü
Başka uygulamalarda, örneğin tork geriliminden doğrudan bir X-Y sapması isteniyorsa, dönüş bildiricisine yine birbirlerine göre 90° açıyla yerleştirilmiş, sinüs/kosinüs gerilimi üreten iki adet stator sargısı yerleştirilir.
Resim 4: Dönüş bildirici sistemin çalışma prensibi

Bu Dönüş Bildirme işlevine çözücü (resolver) denir. Eski elektromekanik analog hesaplayıcılarda bu sistem sinüs- ve kosinüs işlevlerini hesaplamak için kullanılırdı.