Compensación del viento


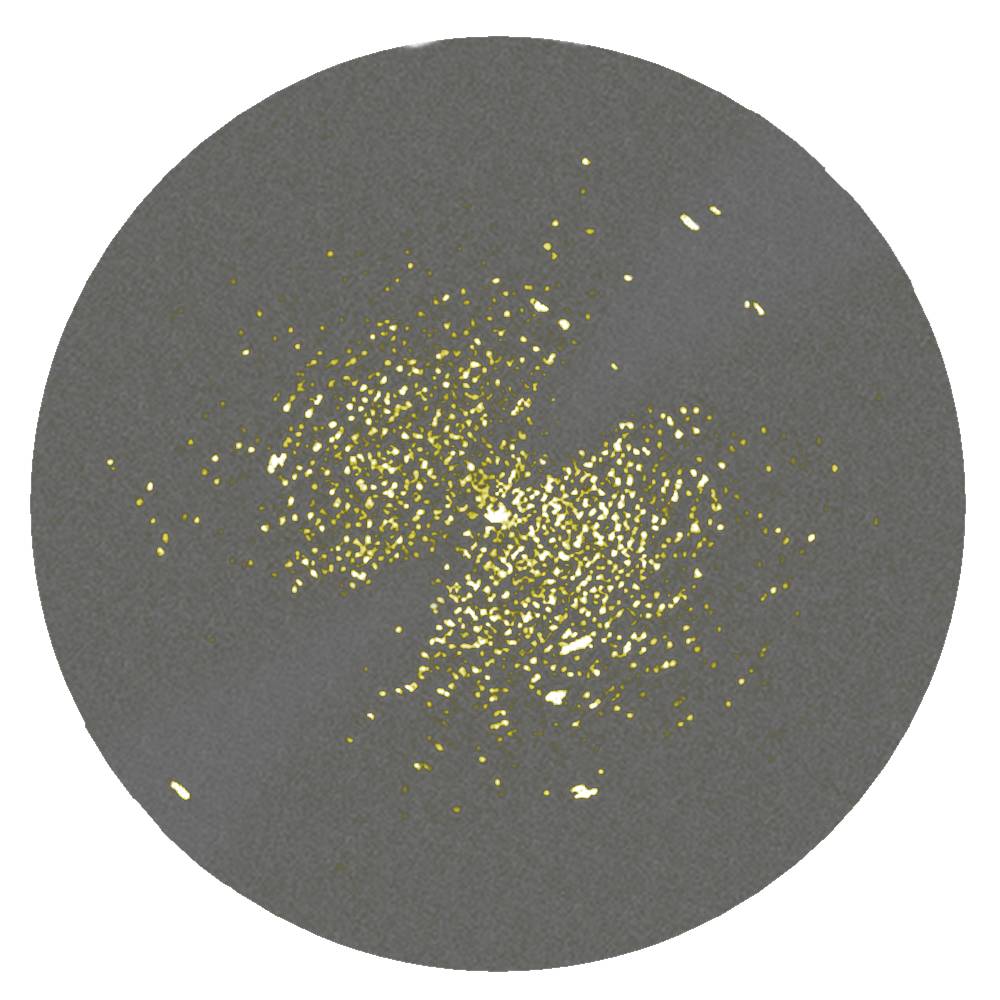
Figura 1: Indicador de posición con un desorden marítimo típico
{kind=link}
¿Cómo funciona la supresión del estado del mar?
Compensación del viento
La compensación del viento es un circuito clásico de supresión de interferencias pasivas.
El tamo conocido de la Segunda Guerra Mundial, así como el clutter marino (véase la imagen adyacente) son clutter fijos que, sin embargo, pueden moverse a una velocidad dependiente de la dirección del viento. Los simples sistemas de indicación de objetivos móviles (MTI) basados en el principio Doppler no pueden suprimir estas interferencias a partir de una determinada velocidad del viento.
Una solución técnica a este problema consiste en modular el oscilador coherente del sistema MTI con una frecuencia adicional que corresponde a la frecuencia Doppler de la velocidad del viento. De este modo, se suprimen los objetivos que se mueven a la velocidad del viento.
Mientras esta velocidad del viento sea constante (como ocurre con los radares de control de armas que rastrean un solo objetivo), esto no supone un problema. Pero si la antena gira (como es habitual en los radares de vigilancia aérea), entonces la velocidad radial del viento también cambia dependiendo del ángulo de orientación actual según una función sinusoidal.

coherente
del transmisor
referencia
tensión de excitación
viento ajuste
Figura 2: Diagrama de principio de la compensación del viento

del transmisor
referencia
tensión de excitación
viento ajuste
Figura 2: Diagrama de principio de la compensación del viento
Solución para el procesamiento de señales analógicas
Ya los radares coherentes-en-recepción muy antiguos, como el P–12 ruso, disponían de resolvers, que generaban una tensión de control en función del ángulo de orientación real de la posición de la antena. Esto se corresponde en la curva de tensión con una función seno/coseno, en la que una curva senoidal completa de 360° también se corresponde con el círculo completo de la posición de la antena respectiva. Este resolvedor se puede girar hasta el máximo respectivo de la interferencia y genera así una tensión que, tras la rectificación, se utiliza como medida del ángulo de orientación actual de la antena. Esta tensión de sintonización adicional influye en el oscilador coherente según la función sinusoidal a veces con más o menos fuerza, dependiendo del ángulo lateral actual de la antena.
Sin embargo, cuando se utiliza este método en tierra, el desorden terrestre fijo aparece ahora, desgraciadamente, como una interferencia, ya que no tiene ninguna velocidad de viento. Sin embargo, si este método se utiliza contra las interferencias del estado del mar, esta desventaja no tiene importancia, ya que los blancos fijos también deben mostrarse como ayudas a la navegación. Sin embargo, esta desventaja también se aceptaba en tierra, ya que se podía suponer que objetivos muy importantes estarían ocultos detrás o en la nube de tamo.
Solución para el procesamiento digital de señales
Para poder calcular digitalmente esta componente en una frecuencia Doppler, debe conocerse la dirección de radiación del radar en relación con la dirección del viento. El procesador de señales puede determinarla fácilmente empleando el máximo de una frecuencia Doppler que se produce en una zona amplia. Este máximo es también una medida de la fuerza del viento. La magnitud y la dirección se ponderan para cada ángulo de marcación según una función sinusoidal y se restan de la frecuencia Doppler medida. De este modo, todas las señales de eco que se mueven con la velocidad del viento obtienen una frecuencia Doppler de cero y se suprimen como un objetivo fijo.
Al mismo tiempo, se tiene en cuenta incluso la velocidad de la plataforma del radar, ya que el procesador de señales del radar sólo puede medir la superposición de la dirección del viento y su rumbo, y la velocidad del viento y su velocidad de crucero.
¡Pero cuidado! Desgraciadamente, los radares de navegación baratos para barcos y botes suelen vender también un simple control manual de los valores del umbral como „supresión del estado del mar”. Una solución tan primitiva empeora la probabilidad de detección de los objetos más pequeños en la misma medida.