Radary 2D lub 3D

Rysunek 1: Schemat typowego radaru 2D, obracającego się z wykresem cosecant kwadratowej funkcji.
Radary 2D lub 3D
2D- Radar
Radar rozpoznania powietrznego musi skanować przestrzeń o określonym rozmiarze wokół radaru w poszukiwaniu sygnałów echa z samolotów. Jego charakterystyka promieniowania anteny jest dostosowany do wykonywanego zadania. Najczęściej używany jest wzór wirującego wachlarza lub wzór cosecant squared. Ta forma skanowania przestrzennego nazywana jest radarem 2D. W przypadku takiego radaru można zmierzyć tylko dwie współrzędne w celu określenia pozycji. Dwa samoloty lecące jeden na drugim mogą być wykryte przez ten radar tylko jako jeden (ale większy) cel.
Aby uzyskać trzecią współrzędną, informację o wysokości (jako kąt elewacji lub obliczoną wysokość), dwa radary musiały współpracować ze sobą na początku technologii radarowej (około II wojny światowej, a nawet w okresie powojennym). Jeden radar pracował jako radar dookólny, a drugi radar był wówczas wyspecjalizowany jako tzw. radiowysokościomierzowy. Oba typy radarów, radar dookólny i radar wysokościowy, mogły mierzyć tylko dwie współrzędne, więc w obu przypadkach był to radar 2D.
W przypadku sprzętu radarowego wykorzystywanego przez wojsko, czynnik kosztów odgrywa raczej podrzędną rolę. Z drugiej strony, radary do kontroli ruchu lotniczego nie mogą być zbyt drogie. Z tego powodu do rozpoznania przestrzeni powietrznej wykorzystywane są zazwyczaj tylko radary 2D. Wysokość lotu jest następnie podawana przez radar wtórny.
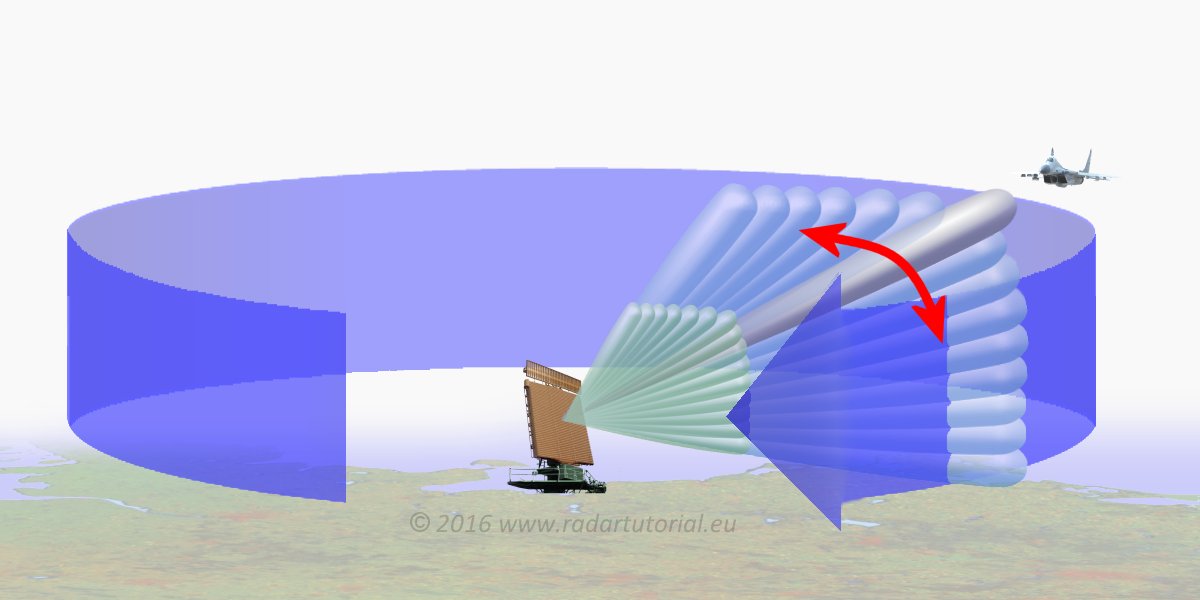
Rysunek 2: Schemat typowego radaru 3D, połączenie szybkiego elektronicznego obrotu wiązki ołówkowej i mechanicznego obrotu.

Rysunek 2: Schemat typowego radaru 3D, połączenie szybkiego elektronicznego obrotu wiązki ołówkowej i mechanicznego obrotu.
Radar 3D
Gdy pomiary wszystkich trzech współrzędnych przestrzennych są wykonywane przez jedną jednostkę radarową, jest ona nazywana radarem 3D.
Szczególną formą radaru 3D jest radar meteorologiczny. Skanuje on przestrzeń w układzie spiralnym z bardzo wąskim wzorem anteny w pionie i poziomie. Jednak pełne przejście z obrotem i obrotem anteny we wszystkich kierunkach zajmuje do 15 minut. Takie podejście czasowe nie wchodzi w rachubę w przypadku powietrznego radaru rozpoznawczego, ponieważ bardzo szybkie samoloty mogą pokonać ogromny dystans w ciągu tych 15 minut. Samolot poruszający się z prędkością dźwięku pokonuje prawie 300 km w 15 minut!
Radar 3D do rozpoznania powietrznego wymagał początkowo ogromnych nakładów technicznych. Kilka kanałów odbiorczych musiało istnieć równolegle, a antena musiała zapewniać kilka wzorców odbioru. Takim radarem był na przykład Medium Power Radar (MPR), który dziś nie jest już używany. Jego ogromna antena paraboliczna miała 36 promienników tubowych i tworzyła łącznie różnych wąskich wzorów odbioru, które były ustawione jeden nad drugim pod różnymi kątami elewacji. Na podstawie informacji, w którym z kanałów odbioru przetwarzany był sygnał echa i w którym kierunku wskazywały ich schematy, można było interpolować dokładny kąt elewacji i obliczyć wysokość docelową na podstawie zmierzonej odległości. W przypadku transmisji, niezwykle duża moc nadawcza musiała być wysyłana we wszystkich kierunkach jednocześnie. Dlatego oba stopnie wyjściowe nadajnika składały się z impulsowych klistronów dużej mocy, które zapewniały moc impulsu do 20 megawatów.
Starsze radary 3D z płaską lub tylko liniową anteną fazową nie nadają we wszystkich kierunkach, które można obserwować jednocześnie. Anteny te mogą skanować przestrzeń tylko w ograniczonym sektorze. Istnieją tutaj dwie możliwości: albo antena obraca się pod kątem bocznym i elektronicznie skanuje tylko kąt elewacji, albo cztery anteny są statycznie rozmieszczone wokół nośnika, z których każda obejmuje tylko 90°, ale umożliwia łącznie 360° rozpoznania. W tym przypadku, nawet podczas nadawania, antena nadaje tylko w określonym kierunku, a następnie czeka na sygnał echa z tego kierunku.
Antena obrotowa ma decydującą wadę. Ponieważ poszczególne kąty elewacji są skanowane jeden po drugim w czasie, nie może ona obracać się zbyt szybko, aby ograniczony budżet czasowy nie powodował luk w rozpoznaniu. Z drugiej strony, wersja z antenami statycznymi ma tę zaletę, że praktycznie cztery radary skanują przestrzeń jednocześnie i podlegają tylko jednemu wspólnemu przetwarzaniu danych radarowych. W tym przypadku system radarowy może być używany znacznie bardziej elastycznie i może wykonywać kilka zadań jako radar wielofunkcyjny. Nowoczesne radary są zatem zawsze radarami wielofunkcyjnymi.
Tylko dzięki możliwości cyfrowego kształtowania wiązki i wynikającemu z tego równoległemu przetwarzaniu wszystkich kanałów odbiorczych ten problem czasowy zostanie całkowicie przezwyciężony. Jednak, podobnie jak w przypadku MPR , cały skanowany obszar musi być oświetlony przesyłaną energią w momencie transmisji. Dzięki pojedynczej, bardzo specjalnej antenie w kształcie kurzego gniazda, opatentowanej przez Fraunhofer Institute for High Frequency Physics and Radar Technology (FHR), cała półkula wokół radaru może być monitorowana jednocześnie.
Czy istnieje coś takiego jak radar 4D?
Czwarty wymiar jest czasami fizycznie definiowany jako czas. W odniesieniu do współrzędnych celu radaru byłaby to częstotliwość Dopplera. Jednak częstotliwość Dopplera jest również mierzona przez klasyczne radary 2D bez ich mutacji w radary 3D. Ponieważ radar 3D mierzy częstotliwość Dopplera jako czwarty parametr oprócz kąta bocznego, kąta elewacji i zasięgu skośnego (a każdy nowoczesny radar zwiadowczy powinien być w stanie to zrobić), czy nagle ma to być radar 4D?
Tak więc radar 4D to tylko hasło promujące sprzedaż, które nie ma nic wspólnego z czwartym wymiarem.