Радиолокаторы подповерхностного зондирования

процессор и дисплей
передатчика,
приемника и антенн
перемещения
Рисунок 1. Радиолокатор подповерхностного зондирования в действии,
© 2010 Swedish History Museum, Stockholm

процессор и дисплей
передатчика,
приемника и антенн
перемещения
Рисунок 1. Радиолокатор подповерхностного зондирования в действии,
© 2010 Swedish History Museum, Stockholm

«мексиканская шляпа»
(вейвлет)
Рисунок 2. Используемая частота является компромиссом между глубиной проникновения сигнала и разрешением,
© 2015 Christian Wolff, www.radartutorial.eu

«мексиканская шляпа»
(вейвлет)
Рисунок 2. Используемая частота является компромиссом между глубиной проникновения сигнала и разрешением,
© 2015 Christian Wolff, www.radartutorial.eu
Радиолокаторы подповерхностного зондирования
Радиолокатор подповерхностного зондирования или подповерхностный радиолокатор (в англоязычной литературе – Ground Penetrating Radar, GPR) — это общее название радиолокационных устройств, реализующих технологии использования электромагнитных волн для построения изображений и определения свойств объектов, находящихся в оптически непрозрачных средах, таких как, например, грунт, бетон, кирпичная кладка, асфальт, камень, дерево и лед. Радиолокаторы такого типа, используемые для исследования объектов, находящихся в толще Земли, еще называют георадарами. Это метод неразрушающей подповерхностной визуализации, который разрабатывался с 1970-х годов для подповерхностного исследования Земли на небольших глубинах и с высоким разрешением. Радиолокаторы подповерхностного зондирования являются примером успешной реализации сверхширокополосной радиолокации. Обычно радиолокатор такого типа с дальностью действия 1 метр работает в диапазоне частот от 300 МГц до 3 300 МГц. Подповерхностная радиолокация — это метод, который обычно используется при проведении экологических, инженерных, археологических и других исследований на небольших глубинах. В сравнении с другими методами, подповерхностная радиолокация является более быстрым, простым в применении и недорогим методом. Интенсивность излучения такого радиолокатора абсолютна безвредна. Как правило, средняя мощность излучения имеет порядок милливатт.
Как работает подповерхностный радиолокатор?
В подповерхностном радиолокаторе электромагнитная энергия используется для получения информации о толще исследуемой поверхности. При функционировании такой радиолокатор медленно перемещается вдоль исследуемой поверхности (непосредственно по ней либо на небольшом расстоянии), а электромагнитная энергия излучается антенной вниз в грунт. Энергия отражается от границ подповерхностных объектов, имеющих электрический контраст, то есть от границ, на которых диэлектрическая и / или магнитная проницаемости среды распространения испытывают разрыв или скачок. Отраженная энергия распространяется в разные стороны, в том числе, и к приемной антенне. На основе анализа принятого сигнала в подповерхностном радиолокаторе определяется глубина, проводимость, диэлектрическая проницаемость, плотность и местоположение подповерхностных объектов. Глубина может быть рассчитана по времени запаздывания эхо-сигнала. В зависимости от типа системы, а также типа и состояния грунта, радиолокатор подповерхностного зондирования может выполнять измерения на глубину нескольких десятком метров и на основе этого строить поперечное сечение исследуемого пространства.

(интерактивный рисунок)
Технические исполнения радиолокаторов подповерхностного зондирования можно разбить на две группы. Радиолокационные системы, излучающие импульсный сигнал и принимающие отраженный от цели сигнал, называют импульсными радиолокаторами. В таких радиолокаторах применяются приемники с дискретизацией по времени и они рассматриваются как работающие во временной области. Для получения большой ширины спектра зондирующие импульсы должны иметь очень малую длительность, как правило, порядка наносекунд и даже меньше. Часто в таком радиолокаторе для получения большой ширины спектра используется уменьшение нижней границы спектра вплоть до нуля. В этом случае передатчик не модулирует колебание несущей частоты, а выдает на антенну очень короткий импульс высокого напряжения (амплитуда в диапазоне от 20 до 200 Вольт). Такой зондирующий импульс будет иметь спектр в полосе нижних частот. Графическое изображение его зависимости от времени напоминает «мексиканскую шляпу» и математически описывается в виде отрицательной нормированной второй производной функции Гаусса, поэтому иногда такой сигнал еще называют Гауссовым видеоимпульсом.
Системы подповерхностной радиолокации, в которых последовательно излучаются сигналы на разных частотах и отраженные от цели сигналы принимаются приемником с преобразованием частоты, рассматриваются как работающие в частотной области. Такие системы, как правило, представляют собой радиолокаторы непрерывного излучения со ступенчатой частотной модуляцией. Эти радиолокаторы имеют более простую структуру и, следовательно, меньшую стоимость, однако работают намного медленнее. Время запаздывания сигнала в них определяется путем выполнения обратного быстрого преобразования Фурье. Благодаря объединению большого количества эхо-сигналов в FMCW-радиолокаторах достигается лучшее отношение «сигнал-шум».
Выбор диапазона рабочих частот осуществляется путем поиска компромисса между желаемыми разрешением и требуемой глубиной зондирования. Сигналы на более низких частотах глубже проникают в грунт, но при этом разрешающая способность является более низкой. Кроме этого, следует учитывать то, что радиолокационный сигнал по-разному затухает в различных грунтах. Так, плотные влажные глины являются наиболее трудным для проникновения электромагнитных волн материалом, тогда как чистый сухой песок – наиболее легким. Минимальный размер объекта, видимого радиолокатором, увеличивается с уменьшением частоты антенны. На Рисунке 2 приводится качественное представление зависимости глубины проникновения и размера объекта зондирования от значения рабочей частоты георадара. На частоте 1 МГц радиолокатор может обнаруживать объекты на глубине до 30 … 40 метров, однако два объекта будут разрешаться только если расстояние между ними будет не менее 2 метров. Фактором, определяющим вертикальное разрешение (по глубине), является эффективная ширина спектра принятого сигнала. Горизонтальное разрешение определяется параметрами диаграммы направленности используемой антенны. Его можно несколько улучшить, применяя методы обработки сигналов, схожие с используемыми в радиолокаторах с синтезированными апертурами (SAR), однако результативность их в данном случае ограничена из-за того, что скорость распространения электромагнитной волны в грунтах разных типов не постоянна.
В используемом диапазоне частот работают также много мобильных сетей. Излучаемые ими сигналы могут существенно влиять на работу георадаров. Поэтому пользователь должен убедиться, что во время измерений его мобильный телефон переключен в автономный режим. Одним из способов снижения негативного влияния таких помех является использование фазово-кодовой модуляции. Такой тип модуляции может использоваться в узкополосных FMCW-радиолокаторах.

Рисунок 3. Здесь множество А-диаграмм (повернутых на 90º) объединены в одну В-диаграмму. Положительная часть импульсов окрашена белым и имитирует модуляцию интенсивности сигнала на В-диаграмме

Рисунок 3. Здесь множество А-диаграмм (повернутых на 90º) объединены в одну В-диаграмму. Положительная часть импульсов окрашена белым и имитирует модуляцию интенсивности сигнала на В-диаграмме
Обработка сигналов в подповерхностных радиолокаторах
При функционировании георадара из полученных им данным формируется необработанное изображение вдоль линии его движения. Оно строится в виде поперечного (по отношению к линии движения радара) сечения зондируемого пространства. Поскольку антенны таких радиолокаторов не могут быть остронаправленными из-за работы на низких частотах и требуемой полосы частот, то даже те объекты, которые расположенные в грунте не точно под антенной, тоже будут порождать эхо-сигналы. Однако отображаться такие эхо-сигналы будут так, как будто они находятся точно под радиолокатором. При большой наклонной дальности до объекта отметка цели будет отображаться на глубине, большей чем в действительности. При подходе радиолокатора к объекту, прохождении над ним и удалении от него отметки от цели сформируют изображение в виде гиперболы. Действительное положение объекта соответствует вершине такой гиперболы. В необработанном изображении всегда присутствует как минимум одна непрерывная линия вблизи поверхности. Она соответствует сигналу от передающей антенны, проникающему в приемную антенну непосредственно через воздушное пространство. Эта линия будет устранена при дальнейшей обработке. Как правило, в изображении присутствует еще одна линия, соответствующая сигналу, отраженному от границы раздела сред.
С помощью обработки радиолокационных сигналов необработанное изображение может быть сведено к изображению только действительного положения объектов путем применения различных цифровых фильтров. С помощью этих фильтров выполняется компенсация потерь рассеяния, шумов и помех от различных неоднородностей грунта, не являющихся объектами (называемые также «помехи грунта»). Кроме этого, для компенсации затухания сигнала в грунте может применяться увеличение коэффициента усиления в зависимости времени запаздывания.
Однако пересчет времени запаздывания в расстояние / глубину не является таким же простым, как для радиолокаторов, работающих по целям в воздушном пространстве. Скорость распространения электромагнитной волны в грунте меняется в широких пределах. В сухой почве она в два раза меньше, чем скорость распространения в свободном пространстве. Во влажном песке и глине она уменьшается до четверти от этой скорости, а в воде становится немногим больше одной десятой от нее. Эти значения должны быть известны заранее и могут оцениваться, например, путем измерения электрического сопротивления или сравниваться с результатами сейсмологических исследований. Однако окончательное заключение может дать только бурение скважин.
Результаты одного радиолокационного измерения могут быть отображены в виде одномерной диаграммы (А-диаграмма, A-Scan), аналогичной изображению на экране осциллографа. В таком виде отображается зависимость амплитуды принятого сигнала от времени для одного измерения по цели. На экране ось Х соответствует оси времени, а вдоль оси Y откладывается амплитуда отраженного сигнала. Получаемую в результате фигуру, повернутую на 90º, называют «следом». При объединении большого количества таких осциллограмм («следов») получается двумерное изображение (В-диаграмма, B-Scan). На двумерном изображении по оси Х откладывается пройденный радиолокатором путь, а по оси Y – время. В этой координатной системе различными цветами отображаются эхо-сигналы, модулированные по яркости. Таким образом, двумерное изображение формируется из одномерных (поперечное сечение грунта), последовательно получаемых по пути движения радиолокатора. Объединяя несколько таких, полученных параллельно, изображений, можно сформировать изображение в виде, так называемой С-диаграммы (C-Scan), где по осям Х и Y откладываются расстояния на поверхности исследуемого участка на определенной глубине. Трехмерное изображение, подобное приведенному на Рисунке 7, составляется из нескольких С-диаграмм, полученных для нескольких заданных глубин. В профильной литературе все перечисленные виды представления результатов (диаграммы) называют радарограммами. Термины В-диаграмма (B-Scan) и С-диаграмма (C-Scan) характерны при рассмотрении радиолокаторов подповерхностного зондирования и их не следует путать с терминами, обозначающими типы индикаторных устройств обзорных радиолокаторов и радиолокаторов сопровождения (А-типа, В-типа и С-типа).

конических стержней
между излучателем
и рефлектором
Рисунок 4. Структура импульсной излучающей антенны (IRA)

конических стержней
между излучателем
и рефлектором
Рисунок 4. Структура импульсной излучающей антенны (IRA)
Импульсная излучающая антенна
Для подповерхностного радиолокатора, работающего в частотной области выбор антенны не является сложной задачей. Ширина полосы частот такой антенны должна накрывать диапазон используемых частот. Для импульсных радиолокаторов (работающих во временной области) выбор антенны гораздо более труден. Антенны должна иметь один и тот же фазовый центр для всех частотных составляющих, чтобы форма импульса не изменялась. Поэтому, например, логопериодическая дипольная антенна здесь не подходит. Кроме того, для портативного оборудования антенна должна иметь небольшие геометрические размеры.
Импульсные излучающие антенны (Impulse Radiating Antenna, IRA) разработаны специально для сверхширокополосных приложений. Такие антенны состоят из диполя, например в виде кругового конуса, расположенного перед параболическим отражателем. Они имеют хорошую направленность и допускают очень высокую пиковую напряженность поля. При диаметре 0,8 метра полоса частот такой антенны составляет от 0,2 до 6 ГГц. Благодаря наличию резистивного слоя между двумя половинами облучателя и параболическим отражателем предотвращается нежелательное отражение составляющих импульса на очень высоких частотах. Конструкция импульсной излучающей антенны гораздо более компактна, чем электрически эквивалентной ей линейной конусовидной ТЕМ-рупорной антенны.
Применения
Радиолокаторы подповерхностного зондирования могут иметь различные конструкции в зависимости от назначения. Это могут быть, например, переносные устройства, вручную устанавливаемые на исследуемую поверхность (грунт или стену). Такие устройства также подходят для обследования неметаллических материалов на наличие трещин или пустот. Устройства больших размеров могут перемещаться по поверхности грунта вручную или на небольшой тележке, которую толкает человек-оператор. Корпус антенны и тележка должны изготавливаться из неметаллических материалов, чтобы не создавать дополнительных помех. Возможна также установка радиолокатора на автомобильном шасси, но в этом случае требуется неметаллическая стрела, закрепляемая спереди или сзади автомобиля. Подповерхностный радиолокатор может также перемещаться на подвесной платформе вертолета, как, например, в системе «HERA» ((HE licopter RA dar производства шведской компании RST.
Радиолокатор подповерхностного зондирования MARSIS является составной частью космического корабля Mars Express. С его помощью проводилось исследование марсианского грунта на глубину 5 километров на частотах от 1,8 до 5 МГц. При этом расстояние от антенны радиолокатора до поверхности Марса составляло от 300 до 800 километров.
Радиолокаторы подповерхностного зондирования используются для геологического картографирования, что включает в себя определение глубины залегания коренной породы, глубины уровня грунтовых вод, глубину и толщину грунтов и отложений на суше и под пресными водоемами, а также местонахождения внутренних полостей и трещин в породе. Другие применения включают в себя определение местоположения таких объектов как трубы, резервуары, кабели и валуны, установление границ свалок и траншей, картографирование зон загрязнения и проведение археологических исследований. Объединение данных, полученных при помощи подповерхностной радиолокации, с данными, полученными другими геофизическими методами (сейсмическими или электромагнитными) повышает информативность исследования.
Картинная галерея археологического использования георадарной установки
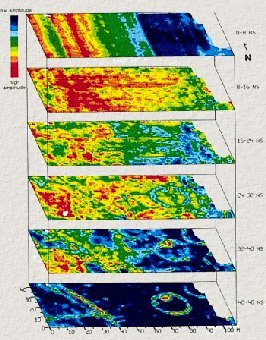
Радиолокационное обследование, проведенное Дином Гудманном (Dean Goodman) в Японии, выявило круговой курган с захоронением внутри него, что отчетливо видно на нижнем сечении на Рисунке 6. На Рисунке 7 представлено трехмерное изображение полости захоронения, которое было найдено Дином Гудманном на кургане на острове Кюсю в Японии. В нем находились останки воина с различными артефактами, включая бронзовые мечи. (Источник фотографий: Дин Гудманн)

Рисунок 5. Устаревший георадар в действии

{kind=link}
{kind=link}

Рисунок 7. Трехмерное изображение в разрезе