Radar pulsado

Figura 1: Principio del sondeo por pulsos.

Figura 1: Principio del sondeo por pulsos.


Radar pulsado
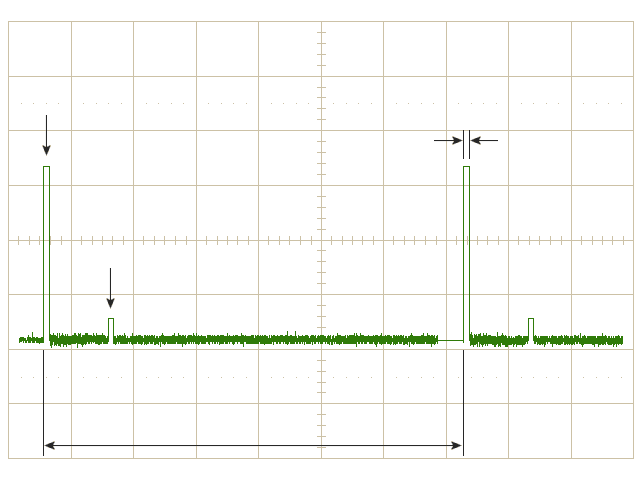
Figura 2: Relación entre impulsos y ecos.

Un radar de pulsos es un dispositivo de teledetección que emite pulsos y luego pasa a un modo de escucha del eco devuelto por los objetivos en el entorno. A diferencia del radar CW, el transmisor se apaga durante el tiempo de escucha. Este método de ecolocalización se caracteriza por la transmisión de pulsos muy cortos de duración τ del orden de ≈ 0,1 à 1 µs y un tiempo de escucha mucho mayor (Τ >> τ) del orden de 1 ms, como se demuestra en la figura 2. La distancia al objetivo se >determina por el tiempo de ida y vuelta de la señal (para un radar estacionario) o comparando el espectro Doppler entre la señal transmitida y el eco con respecto a la distancia (para un radar móvil). Los radares pulsados están diseñados principalmente para la detección de largo alcance y, por tanto, emiten pulsos muy potentes.
Una diferencia importante con respecto a otros tipos de radar es la necesidad de una sincronización eficaz de cada proceso en el circuito del radar. El flanco de entrada del impulso es el tiempo de referencia para todo el proceso. El proceso termina con la recepción del frente de onda del eco. Cualquier retraso sistemático en los circuitos internos del procesador debe tenerse en cuenta para obtener el tiempo real de ida y vuelta y, por tanto, el alcance del objetivo. Cualquier variación temporal aleatoria que se pueda añadir influirá directamente en la precisión del radar.
Señal transmitida
La forma de onda transmitida puede describirse matemáticamente como
| s(t) = A(t)· sin[2πf(t)·t + φ(t)] | (1) |

Figura 3: Descomposición del espectro de frecuencias asociado a una onda cuadrada a la frecuencia de la portadora ftx

Figura 3: Descomposición del espectro de frecuencias asociado a una onda cuadrada a la frecuencia de la portadora ftx
La función A(t) es la variación de la amplitud del impulso con el tiempo, es decir, su modulación. En el caso más sencillo, el emisor transmite durante periodos cortos τ y está apagado el resto del tiempo. Por tanto, A(t) es igual a 1 durante τ y cero en caso contrario. La función temporal viene determinada por la frecuencia de repetición de los impulsos y el ciclo de trabajo. Dado que los ecos que regresan al radar están sometidos a diversas pérdidas, una modulación de amplitud diferente de la señal en este caso no supone ninguna ventaja para su descodificación en el receptor. Por otro lado, dicha onda cuadrada puede descomponerse en un espectro de frecuencias igual a una función (sin x)/x. La mayor parte de la potencia transmitida (nótese que la escala es logarítmica en la Figura 3) se encuentra en la región de frecuencias BHF = 2/τ alrededor de la frecuencia portadora ftx.
La frecuencia de repetición de impulsos (PRF), la longitud de los impulsos τ y el tiempo de escucha (Τ − τ) influyen en las prestaciones del radar: distancia ciega cerca del radar y alcance máximo no ambiguo. La longitud del pulso τ también afecta a la célula de resolución ΔR del radar:
| ΔR = 0.5·τ·c | (2) |
Cuanto más corto sea el pulso, mejor podrá el radar resolver dos objetivos situados uno detrás del otro, en lugar de obtener un único objeto grande. Sin embargo, el ancho de banda de la onda portadora BHF aumenta al disminuir la anchura del pulso:
| BHF = τ−1 | (3) |
El acortamiento del pulso también limita el alcance máximo en el caso simple. Esto se debe a que la energía Ep contenida en el pulso depende de su longitud, y cuanto más corto sea el pulso, menor será la energía a una distancia determinada del radar y menos probable será que se devuelva al radar una potencia medible.
Por lo tanto, para lograr el máximo alcance, la energía es el factor crucial, no la potencia de transmisión:
| Ep = Ps· τ = Pmoj· Τ = | Pmoj | con | Ep = energía del pulso PS = potencia del transmisor Pmoj = potencia media |
(4) |
| fFRI |
Se pueden conseguir mejoras significativas modulando la envolvente del pulso (compresión del pulso), donde un pulso largo se comprime en uno más corto. La relación entre la duración del impulso transmitido y el devuelto se resuelve mediante la descompresión en el receptor. La posición individual de los objetivos sondeados por el pulso comprimido también puede obtenerse mediante el tiempo de ida y vuelta.
La función φ(t) de la ecuación (1) expresa la diferencia de fase en el tiempo de la señal. La fase inicial emitida por el emisor es siempre la misma y su evolución temporal se extrapolará fácilmente en el caso de un radar coherente. En el caso de un radar coherente en la recepción (o pseudocoherente), la fase inicial es aleatoria y debe registrarse para compararla con el eco. Si no se observa, se dice que el radar es „incoherente”. Esto es importante para la modulación intrapulso de los pulsos comprimidos y el análisis del desplazamiento Doppler.
Eco
La forma de la onda del eco está influida por muchos fenómenos que no permiten conocerla antes de su llegada al radar. Para simplificar, se supone que las longitudes del pulso y del eco son iguales. Esto permite establecer una relación sencilla entre la energía del eco y la señal de sondeo (utilizada en la ecuación fundamental del radar) sin tener en cuenta la posible diferencia introducida por:
- La reflexión de la señal transmitida, que puede tener un espectro de frecuencias diferente, implica:
- armónicos de la portadora;
- desplazamiento Doppler debido al movimiento del objetivo.
- La posible dirección de polarización diferente;
- Longitud no constante de un eco debido al alargamiento por interferencia con otras reflexiones de blancos en la misma zona pero en posiciones ligeramente diferentes y, por tanto, con un tiempo de ida y vuelta ligeramente distinto.
Para diseñar un receptor o filtro adaptado que minimice estos efectos de distorsión, es necesario utilizar varios canales de recepción en paralelo. En un circuito selectivo, se elige el eco con la mejor relación señal-ruido (incluyendo las interferencias) para su posterior procesamiento. También se conserva la „posición” de este eco óptimo.
En general, el ancho de banda del receptor se mantiene lo más estrecho posible para eliminar el ruido fuera de las frecuencias que puede tomar el eco. Por lo tanto, BHF = 1/τ es el ancho de banda más utilizado a ambos lados de la portadora de un radar pulsado. El ruido restante puede filtrarse con un receptor que sume los ecos de varios pulsos suponiendo que el blanco está inmóvil durante los sondeos sucesivos. Como el ruido es aleatorio, la suma del ruido es mucho menor que la señal de eco real y la relación señal/ruido es mucho mejor.
Diagrama de funcionamiento
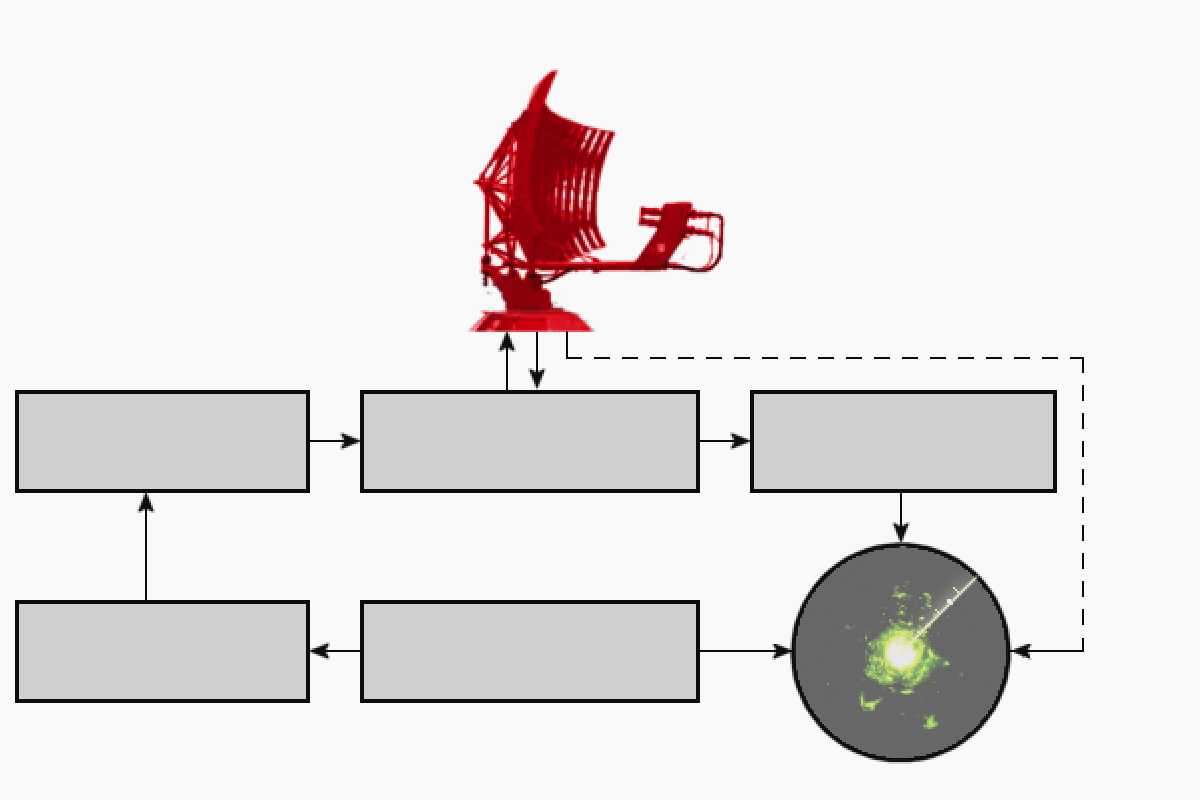
Figura 4: Esquema funcional de un radar primario pulsado

{kind=link}
El diseño de un radar pulsado depende de si el transmisor y el receptor están ubicados en el mismo lugar (monostático) o en dos lugares diferentes (biestático):
- Un radar monostático es más compacto. Incluye las funciones de transmisión, recepción y sincronización en una sola unidad. La distribución de las tareas durante el ciclo de funcionamiento se minimiza al evitar los retrasos de comunicación en el circuito.
- Sin embargo, hay que utilizar una antena de radar con un sistema multiplexor más complejo. El receptor, muy sensible, debe estar protegido de la señal muy fuerte del transmisor. Para ello, un duplexor sirve de enlace alternativo entre la antena y estos dos componentes. Esto también significa que el receptor se apaga durante la transmisión, lo que provoca un punto ciego cerca del radar.
Descripción de los módulos en el diagrama de bloques
Un radar biestático utiliza diferentes antenas para transmitir y recibir. Esta configuración permite que el receptor no necesite protección de la señal del transmisor. En el caso más sencillo, un radar monostático pulsado puede utilizarse con un conjunto de antenas receptoras que deben tener una gran apertura para recibir desde varias direcciones a la vez. Estas antenas pueden estar alejadas entre sí y del transmisor.
El inconveniente de este sistema de radar es la estricta sincronización entre el transmisor y los receptores. Para conocer la distancia a los objetivos por el tiempo de ida y vuelta del eco, los receptores deben conocer la hora exacta de la transmisión de cada pulso. Esto se hace mediante una señal de sincronización a la que hay que añadir el retardo de transmisión en cada antena.
Uno de los primeros usos de este tipo de radar fue en la Cadena Británica durante la Segunda Guerra Mundial. La principal aplicación militar moderna es el radar sobre el horizonte. El radar meteorológico de investigación de Poldirad , en Oberpfaffenhofen, cerca de Múnich (Alemania), es otro ejemplo reciente en el que el radar primario monostático se utiliza como transmisor para los receptores secundarios.
El radar pasivo es otra variante del radar biestático. Utiliza la emisión de diversas fuentes de radiofrecuencia (radio, televisión, otros radares pulsados) para calcular la posición de los objetivos. Se calcula la diferencia de tiempo entre la recepción directa de la señal y la señal reflejada por los objetivos. Las ambigüedades de la medición pueden eliminarse escuchando cualquier emisión aleatoria del objetivo, que puede dar su dirección exacta, o mediante la triangulación entre dos radares pasivos distantes.
Utiliza
Los radares pulsados se utilizan principalmente para la detección de largo alcance, sobre todo en el ámbito militar, el control del tráfico aéreo, la meteorología y la detección de satélites.