Radar à ondes entretenues interrompues avec modulation de fréquence (FMiCW)

Schalter
Figure 1 : Radar FMiCW radar utilisant un commutateur à diode PIN pour mettre hors-circuit l’alimentation du transmetteur.

switch
Figure 1 : Radar FMiCW radar utilisant un commutateur à diode PIN pour mettre hors-circuit l’alimentation du transmetteur.
diode PIN
Figure 1 : Radar FMiCW radar utilisant un commutateur à diode PIN pour mettre hors-circuit l’alimentation du transmetteur. (Image interactive)
Radar à ondes entretenues interrompues avec modulation de fréquence (FMiCW)
Un radar à ondes entretenues interrompues avec modulation de fréquence (en anglais FMiCW pour Frequency Modulated interrupted Continuous Wave) est un type spécial de radar à onde entretenue. Lors de la modulation en fréquence, le signal du transmetteur est coupé vers l’antenne à intervalles réguliers pour en faire un signal pulsé. L’onde complète est cependant fournie au récepteur par une dérivation et celui-ci peut l’utiliser pour la conversion vers la fréquence de base lors de l’analyse des échos.
La mesure de la distance est toujours obtenue par décalage en fréquence entre le signal transmis et l’écho, comme dans un radar à onde entretenue normal, et non par le temps aller-retour de l’impulsion, comme pour radar pulsé avec modulation intra-impulsion. La pulsation est en fait utilisée pour permettre l’utilisation d’un récepteur plus sensible durant les temps morts d’émission et ainsi augmenter la portée utile.
Modulation pulsée de l’amplitude du signal transmis

Figure 2 : Oscillogrammes des différentes composantes des signaux.

Figure 2 : Oscillogrammes des différentes composantes des signaux.
Figure 2 : Oscillogrammes des différentes composantes des signaux.
En pratique, une partie du signal de transmission fuit toujours dans le récepteur dans un radar à ondes entretenues et la sensibilité du récepteur doit être limitée pour ne pas le griller. La pulsation donne certains avantages mais également des inconvénients. Durant les périodes où il n’y a pas de transmission par l’antenne dans un radar FMiCW, il est possible de rehausser la sensibilité du récepteur et donc d’augmenter la puissance durant les périodes de transmission. Cela augmente automatiquement la portée maximale du système.
Pour fonctionner ainsi, il faut cependant mettre hors-cuit le récepteur durant la transmission (par exemple avec une diode PIN à inversion de tension) mais cela réduit le temps d’écoute des échos (en bleu sur la figure 2) qui vont être reçus lorsque la tension est faible sur la diode (en rouge). La différence temporelle entre l’écho et la tension de contrôle (gris) est souvent très courte ce qui peut facilement détériorer la probabilité de détection lors d’une intégration des impulsions non-cohérentes parce que seulement une portion de l’écho est capté par le récepteur. En effet, l’énergie reçu des échos est faible ce qui diminue la portée utile du radar. Les échos à courte portée sont désavantagés par rapport à ceux à plus longue distance, de façon similaire à la technique du gain variable dans le temps (GVT) d’un radar pulsé.
Les radars FMiCW sont particulièrement utilisés dans les systèmes de contrôle automatique de la distance dans les automobiles (gamme de fréquences 76 – 77 GHz). Chaque sous-impulsion peut être émise à un angle légèrement différent avec une antenne à plaque (antenne patch) pour sonder tout un secteur à l’avant du véhicule.
Utilisation pour étendre la portée utile.
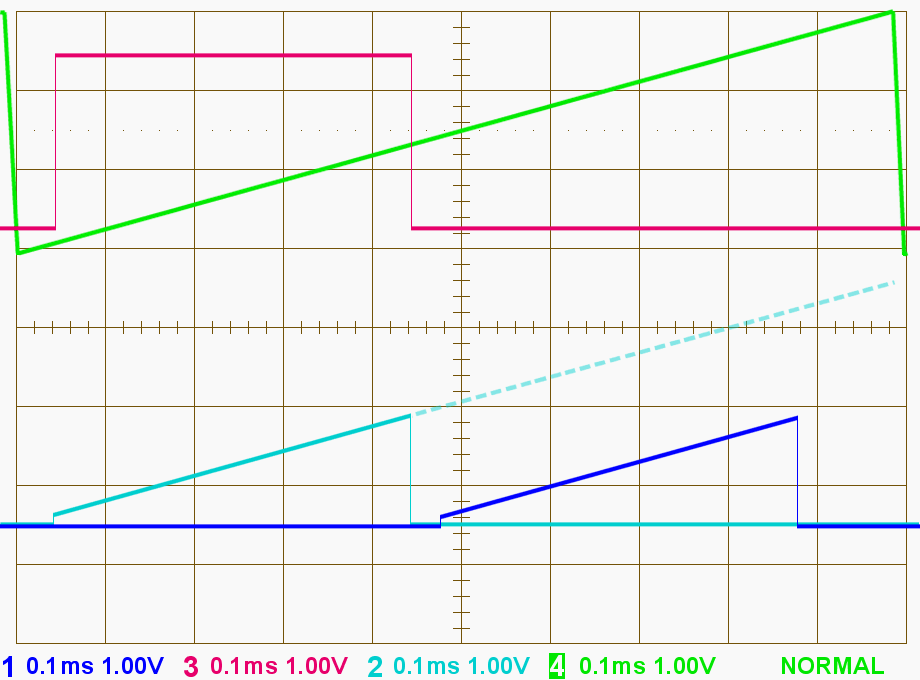
Figure 3 : Oscillogrammes des différentes composantes des signaux.
Figure 3 : Oscillogrammes des différentes composantes des signaux.

Figure 3 : Oscillogrammes des différentes composantes des signaux.
La technique permet aussi d’obtenir pour une meilleure utilisation de la bande passante de transmission. Plus le changement de fréquence est abrupt, plus il augmente la résolution tout en maintenant la portée utile.
Dans un radar à onde entretenue modulée classique de bande ISM (Industrielle, Scientifique et Médicale), le transmetteur émet de 24,0 à 24,25 GHz avec modulation. Un compromis doit être trouvé pour obtenir les meilleures résolutions et portées, deux paramètres dont le comportement est opposé dans ce type de radar. En pulsant l’onde, la pente du changement de la fréquence peut être ajustée, par exemple à deux fois la bande passante, ce qui donne une nouvelle modulation de 24,0 à 24,5 GHz. Cependant, en atteignant la limite supérieure de la bande ISM (24,25 GHz), le transmetteur peut être découplé de l’antenne et laisser ainsi une longue période d’écoute pour l’écho. Ce dernier est ensuite comparé à la plus longue modulation interne en dent de scie de la figure 3 (la partie non émise en pointillés).