Fluctuatie verlies
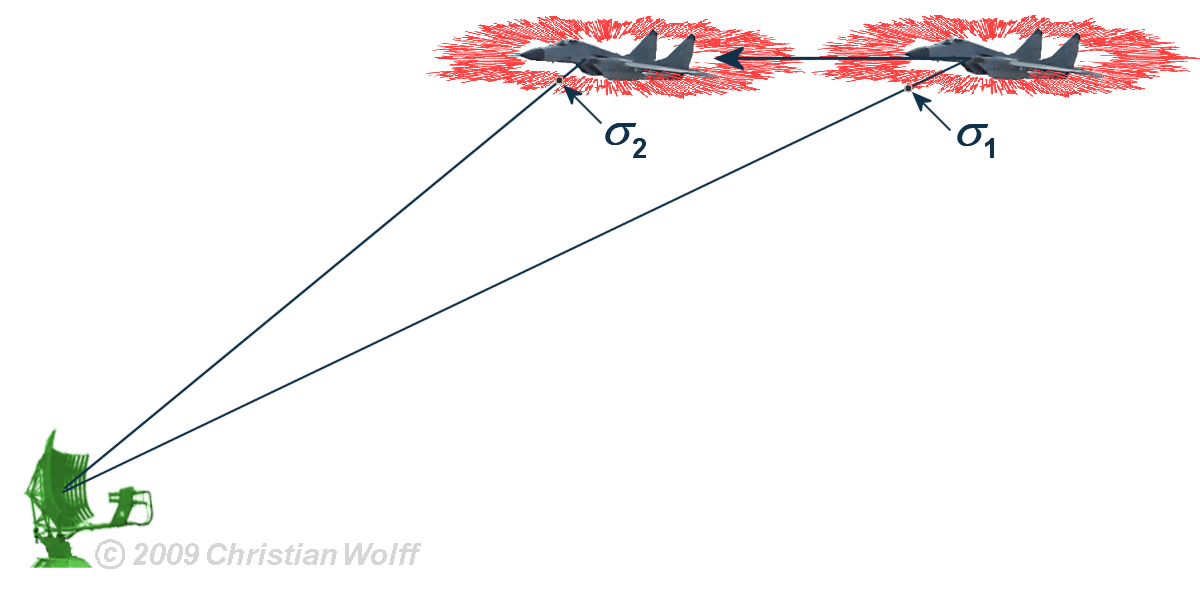
Figuur 1: Oorzaak van de fluctuatie van het weerkaatste signaal

Fluctuatie verlies
Het diagram van de secundaire reflectie van echte vluchtdoelen („effectief reflectieoppervlak”) heeft een meervoudig uitgewaaierd, sterk gekarteld karakter. De fluctuatie van het gereflecteerde signaal is gebaseerd op dit ingewikkelde diagram van het relatieve teruggekaatste gebied. Bij voorwaartse beweging wordt het terugkeerpatroon van het vliegtuig gedraaid ten opzichte van de radar. Het is niet mogelijk te voorspellen welk hoeksegment van dit diagram op een bepaald moment van kracht is. Als gevolg van de temporele veranderingen van de door het doelverloop veroorzaakte amplitudes en faseveranderingen is de ontvangen veldsterkte op de radarset onderhevig aan een sterke fluctuatie, die fluctuatie wordt genoemd.
Voor de mathematische beschrijving van de invloed van de fluctuatie op het radarbereik werden door Peter Swerling in 1954 vier modelgevallen gedefinieerd. Er werd uitgegaan van een rechthoekige antennekarakteristiek, d.w.z. de modulatie van de amplitudes van een echotrein door de antennekarakteristiek werd weggelaten.
De vier modelgevallen („Swerling-gevallen“)
Swerling toont in zijn werk aan dat doelwitfluctuaties extra fluctuatieverliezen L f in de radarvergelijking introduceren. Zij hangen sterk af van de detectiekans PD, maar slechts in geringe mate van de vals-alarmkans PN. (Opmerking: In de literatuur worden de vier modelgevallen soms opeenvolgend genummerd met Romeinse cijfers).
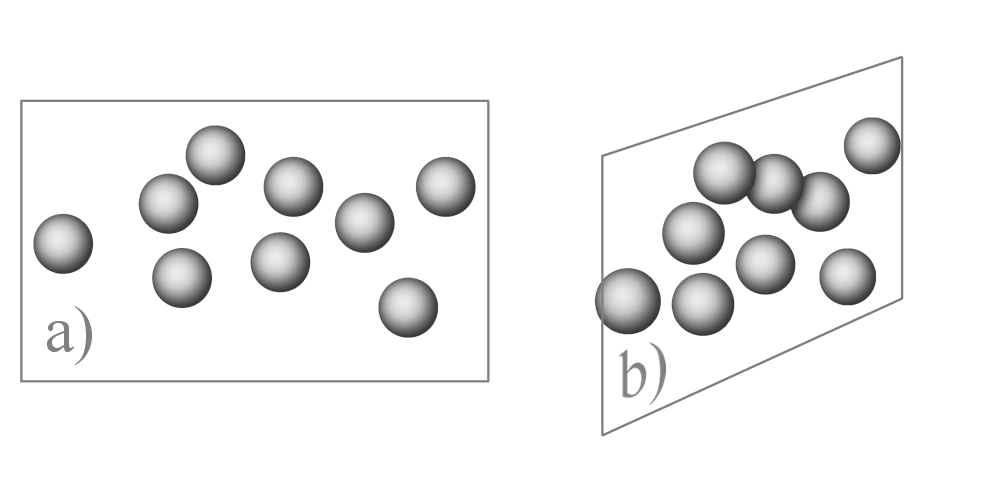
Figuur 2: Swerling 1 en 2: Het doel bestaat uit een aantal isotrope reflectoren van dezelfde grootte, verdeeld over een oppervlak. Vanuit een andere gezichtshoek van dezelfde opstelling (aanzicht b) resulteren verschillende afstanden en dus verschillende interferentievoorwaarden.
Figuur 2: Swerling 1 en 2: Het doel bestaat uit een aantal isotrope reflectoren van dezelfde grootte, verdeeld over een oppervlak. Vanuit een andere gezichtshoek van dezelfde opstelling (aanzicht b) resulteren verschillende afstanden en dus verschillende interferentievoorwaarden.
Modelgeval 1:
De echo-amplituden blijven constant gedurende de rotatie van de antenne over het doel, d.w.z. gedurende de verblijftijd van het doel of de belichtingstijd Td. De omvang ervan verandert echter van monster tot monster op een statistisch onafhankelijke manier, d.w.z. dat de amplitudes in opeenvolgende monsters verschillend zijn en niet gecorreleerd zijn.
Dit model wordt scan-tot-scan fluctuatie genoemd (scan-to-scan fluctuation, hier: revolutie-tot-revolutie). De kansdichtheidsverdeling van het terugkeergebied σ wordt gegeven door de Rayleighverdeling, en de som van het terugkeergebied is exponentieel verdeeld.

 (44)
(44)
waarbij σaverage de gemiddelde waarde is van alle voorkomende backscatter cross sections.
Dit geval karakteriseert het gedrag van doelen die bestaan uit vele onafhankelijke terugstralende elementen van ongeveer dezelfde grootte. Dit geldt bijvoorbeeld voor doelen in de lucht. De radar is een luchtverkenningsradar of een verkenningsradar voor het zeeoppervlak met een relatief snel roterende dekking.
Modelgeval 2:
De fluctuatiewet wordt weer gegeven door vergelijking (44), maar de fluctuatie is veel sneller. Het resultaat is een amplitudeverandering van puls tot puls (puls-tot-puls-fluctuatie) over de n echosignalen van een belichtingstijd.
Evenals geval 1 karakteriseert geval 2 het statistische gedrag van echosignalen van vliegtuigen. Hier gaat het echter niet om een roterende omnidirectionele zoekantenne, maar om een doelzoekende radar die op een doel is gericht.
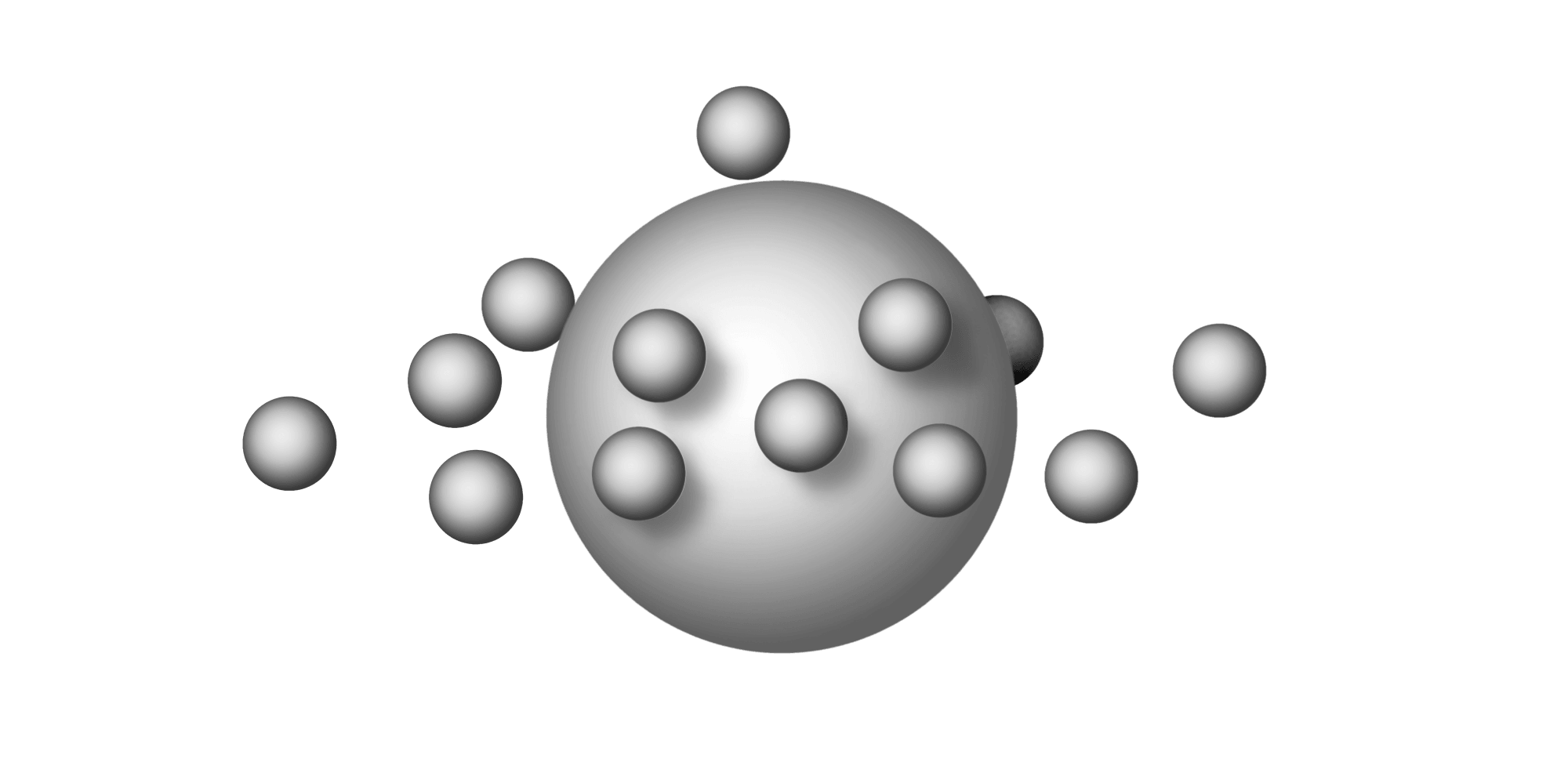
Figuur 3: Swerling 3 en 4: een dominante isotrope reflector wordt overdekt door verscheidene kleine reflectoren.
Figuur 3: Swerling 3 en 4: een dominante isotrope reflector wordt overdekt door verscheidene kleine reflectoren.
Modelgeval 3:
Fluctuatie treedt op van monster tot monster zoals in geval 1, maar volgens de waarschijnlijkheidsverdeling

 (45)
(45)
Modelgeval 4:
Het totale effectieve retroreflectieve oppervlak σges komt overeen met een χ²-verdeling.
De fluctuatie treedt op als in geval 2 van pulsperiode tot pulsperiode, maar de kansdichtheidsverdeling verloopt volgens vergelijking (45).
De gevallen 3 en 4 beschrijven het gedrag van doelen waar een groter propagatiegebied een aantal kleinere propagatiegebieden overlapt, of waar een groot propagatiegebied het aspect enigszins verandert. Ze zullen waarschijnlijk vooral van toepassing zijn op scheepsdoelen.
In de praktijk zijn de gevallen 2 en 4 van betrekkelijk weinig belang, aangezien snelle variatie van puls tot puls ofwel veel hogere doelsnelheden vereist dan die van vliegtuigen, ofwel lange verblijftijden van het doel vereist. Deze speciale gevallen kunnen zich voordoen in raketverdedigingsradars op ware grootte of in artillerieverkenningsradars. Aangezien er in deze gevallen reeds een gemiddelde is van de verschillende amplitudes binnen de echopulstrein, zijn de fluctuatieverliezen in verband met een stationair doelwit betrekkelijk gering. Gemiddeld bedragen zij slechts 1 à 2 dB met een detectiewaarschijnlijkheid PD van meer dan 60%.

Figuur 4: Fluctuatieverlies L f voor Swerling-gevallen 1 en 3.

Figuur 4: Fluctuatieverlies L f voor Swerling-gevallen 1 en 3.
De gevallen 1 en 3 zijn in hoofdzaak van toepassing op zoekradars. Het fluctuatieverlies als functie van de detectiewaarschijnlijkheid PD is weergegeven in figuur 4. Voor PD<30% is er een fluctuatiewinst omdat voor zeer kleine signaal/ruis-verhoudingen de statistische amplitudeveranderingen de opsporing bevoordelen.
Modelgeval 0 of 5:
Deze zaak werd vervolgens als referentie aangenomen. Het is een synthetisch doelwit zonder enige fluctuatie.
Bron:
- Swerling: ''Probability of Detection for Fluctuating Targets'' Rand Research Memorandum RM-1217, 17 März 1954