Частота ложных тревог
Ложной тревогой называют «ошибочное решение об обнаружении радиолокационной цели, вызванное влиянием шумов или других помеховых сигналов, превысивших порог обнаружения». В общем случае, ложная тревога — это ситуация когда отображается наличие цели в то время как в действительности цели нет. Вероятность ложной тревоги оценивается значением частоты ложной тревоги (False Alarm Rate, FAR), которое рассчитывается по следующей формуле:
Ложные тревоги возникают вследствие превышения тепловым шумом уровня предустановленного порога либо из-за присутствия посторонних сигналов (как внутренних по отношению к радиолокационному приемнику, так и внешних относительно радиолокатора) либо по причине неисправности оборудования.
Ложная тревога может проявляться в виде кратковременной засветки на индикаторе с электронно-лучевой трубкой, всплеске на выходе сигнального процессора, в видеосигнале или всеми перечисленными видами.
Если порог обнаружения установлен слишком высоким, то ложных тревог будет мало, однако требуемое для этого значение отношения «сигнал-шум» не будет обеспечиваться для многих действительных целей (например, небольших по размеру или находящихся на больших дальностях), которые из-за этого не будут обнаружены. Если порог обнаружения установлен слишком низким, то большое количество ложных тревог будут маскировать сигналы реальных целей.
| FAR = | (количество ложных целей за период зондирования PRT) | (1) |
| (количество разрешаемых элементов по дальности) |
Ниже приведены возможные варианты выбора порога обнаружения и примеры соответствующих им значений показателей качества обнаружения, которые иллюстрируются на Рисунке 1.
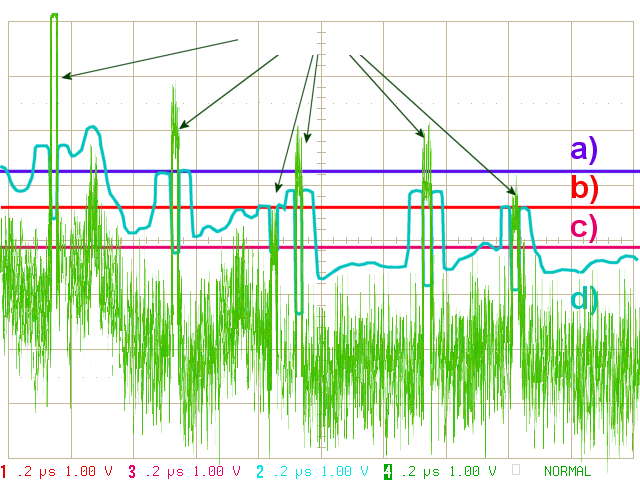
Рисунок 1. Различные варианты выбора порога обнаружения
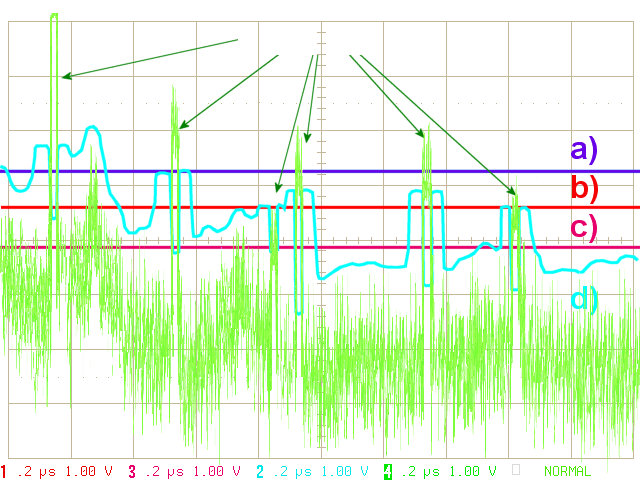
- порог установлен слишком высоким: вероятность обнаружения = 66%
- установлен оптимальный порог: вероятность обнаружения = 83%
но возникает одна ложная тревога!
Вероятность ложной тревоги = 1 / 666 = 1,5 ·10-3 ¹) - порог установлен слишком низким: возникает большое количество ложных тревог!
- порог адаптивно изменяется: постоянная (стабильная) вероятность ложной тревоги.
Вероятность ложной тревоги зависит от суммарного уровня мешающих воздействий, таких как шум, пассивные и активные помехи. В ближней зоне радиолокатора (на небольших расстояниях от его позиции) влияние пассивных помех сильнее, чем влияние шумов. На больших дальностях влияние шумов становится доминирующим. Таким образом, наблюдается эффект зависимости вероятности ложной тревоги от дальности. Однако уравнение радиолокации не дает возможности получить такую зависимость от дальности. Возникает противоречие: для достижения высокой вероятности обнаружения на больших дальностях необходимо понижать порог обнаружения, что приведет к увеличению количества ложных тревог в ближней зоне.
¹) for a Radar set with the maximum range of 100 km and a pulse width of 1,5 microseconds = 666 Rangecells
Стабилизация уровня ложной тревоги (Constant False Alarm Rate, CFAR)

рованные
видеосигналы
CFAR
логический модуль
b) с выбором наибольшего: CAGO-CFAR
c) с выбором наименьшего CASO-CFAR
Рисунок 2. Принцип построения цепи, реализующей методы семейства CA-CFAR

рованные
видеосигналы
CFAR
логический модуль
b) с выбором наибольшего: CAGO-CFAR
c) с выбором наименьшего CASO-CFAR
Рисунок 2. Принцип построения цепи, реализующей методы семейства CA-CFAR
рованные
видеосигналы
CFAR
логический модуль
b) с выбором наибольшего: CAGO-CFAR
c) с выбором наименьшего CASO-CFAR
Рисунок 2. Принцип построения цепи, реализующей методы семейства CA-CFAR
Принцип построения схемы стабилизации уровня ложной тревоги был впервые описан в 1968 году Финном (H.M. Finn) и Джонсоном (R.S. Johnson).[1] Предложенное ими решение проблемы ложных тревог построено на реализации схем с постоянной вероятностью ложной тревоги, в которых порог обнаружения изменяется в зависимости от сигнально-помеховой обстановки.
Хотя существует большое количество схем стабилизации уровня ложной тревоги, как правило, они основываются на «фоновом усреднении» (иногда используется название «стабилизация уровня ложной тревоги путем усреднения по элементам разрешения»). Упрощенная структурная схема приведена на Рисунке 2.
В этой схеме оценивается уровень помех (шумов или пассивных помех) в элементах разрешения (ячейках), примыкающих к текущему анализируемому элементу разрешения (то есть ближе и дальше него), для принятия решения о наличии или отсутствии цели в нем. Процесс выполняется пошагово, для каждого элемента разрешения по дальности и продолжается до тех пор, пока вся дистанция, соответствующая дальности действия радиолокатора не будет проанализирована. Схема построена на основе предположения, что в элементах разрешения, соседствующих с анализируемым, содержится хорошая оценка уровня шума для него, то есть предполагается, что шумы и пассивные помехи являются однородными во времени и в пространстве.
Теоретически такая схема будет обеспечивать стабилизацию уровня ложной тревоги, независящего от уровня шумов и помех при условии, если шум будет распределен по закону Рэлея во всех элементах разрешения, анализируемых схемой.
Стабилизация уровня ложной тревоги с усреднением по элементам разрешения
(Cell-Averaging CFAR, CA-CFAR)
На Рисунке 1 кривая d) соответствует порогу обнаружения, уровень которого адаптирован к уровню шумов. Помеховый всплеск в начале рассматриваемого интервала времени, который вызывает ложную тревогу для варианта выбора порога а), в данном случае также достигает критического значения. Однако эхо-сигнал от третьей цели, который не выделяется даже схемой с оптимальным порогом b), будет обнаружен при использовании схемы стабилизации уровня ложной тревоги CFAR.
Упрощенный принцип стабилизации уровня ложной тревоги показан на Рисунке 2. Элемент схемы, обозначенный знаком суммы («+»), реализует функцию в соответствии с выражением:

Рисунок 3. Сравнение порогов для разным методов CFAR в ситуации наличия целей в двух смежных элементах разрешения: менее интенсивный эхо-сигнал «накрывается» порогом, рассчитанным для более интенсивного[2]

Рисунок 3. Сравнение порогов для разным методов CFAR в ситуации наличия целей в двух смежных элементах разрешения: менее интенсивный эхо-сигнал «накрывается» порогом, рассчитанным для более интенсивного[2]
 (2)
(2)
В методе стабилизации уровня ложной тревоги с усреднением по элементам разрешения (ячейкам) CA-CFAR такое усреднение выполняется также в арифметико-логическом модуле.
Кривая порога CA-CFAR на Рисунке 3 достигает больших значений слева и справа от эхо-сигнала цели, а в ячейке, где находится цель, принимает относительно небольшое значение. Это легко объясняется при помощи схемы, представленной на Рисунке 2. Когда тестируемая ячейка (тестируемый элемент разрешения, Range Cell under test, RUT) находится поблизости (до или после) ячейки, в которой находится цель, то в усреднении принимает участие и эхо-сигнал цели, имеющий, как правило, сравнительно большую амплитуду. Вследствие этого значение порога, рассчитываемое по формуле (2), повышается. Когда же тестируемой ячейкой становится элемент разрешения, в котором находится цель, то амплитуда эхо-сигнала от нее в расчете не участвует. Поэтому значение порога становится относительно низким. Таким образом, метод CFAR обеспечивает повышение контрастности эхо-сигналов большой интенсивности. Однако слабые эхо-сигналы на фоне шумов могут не обнаруживаться даже чаще, чем в случае фиксированного порога. Одним из способов снизить такие потери является исключение из расчета двух ближайших к тестируемой (RUT) ячеек, одной слева и одной справа, показанных на Рисунке 2 пунктирными линиями. Такие неиспользуемые ячейки называют защитными ячейками. Остальные ячейки называют ячейками контрольного (скользящего) окна.
Стабилизация уровня ложной тревоги с усреднением по элементам разрешения и выбором наибольшего
(Cell-Averaging Greatest Of-CFAR, CAGO-CFAR)
При использовании данного метода средняя мощность помехи Z оценивается по-разному и обе части скользящего окна анализируются по отдельности. После этого значение порога определяется как максимальное из двух полученных. Значение Z для CAGO-CFAR рассчитывается по формуле:

 (3)
(3)
Достоинством метода CAGO-CFAR является уменьшение требуемых вычислительных ресурсов и относительно небольшое количество пропусков целей. Кроме этого, в сравнении с CA-CFAR улучшено качество обработки в неоднородных шумах.
Недостатки: все еще невысокая общая эффективность, а также присущая всем разновидностям метода CA-FAR возможность того, что рассчитанный порог будет накрывать эхо-сигналы смежных по отношению к тестируемой ячейке целей (смотри Рисунок 3), из-за чего они не будут обнаружены. Также возникают проблемы при резком изменении интенсивности помеховых сигналов (например, на краях областей фиксированных помех).
Стабилизация уровня ложной тревоги с усреднением по элементам разрешения и выбором наименьшего
(Cell-Averaging Smallest Of-CFAR, CASO-CFAR)
Для реализации этого метола используется та же схема, что и для CAGO-CFAR. Единственным отличием является то, что вместо наибольшего сигнала с выходов линий задержки теперь используется наименьшее. Таким образом, в расчете порога не участвует сильный эхо-сигнал цели, находящейся в смежной ячейке. Вследствие этого вероятность того, что рассчитанный порог будет накрывать эхо-сигналы смежных целей, несколько уменьшается.
CAOS-CFAR или OS-CFAR
Поскольку рассмотренные выше методы стабилизации уровня ложной тревоги неодинаково работают в разных условиях помеховой обстановки (однородная или неоднородная помеховая обстановка), был разработан метод усреднения со статистическим упорядочиванием (Ordered Statistic-CFAR, OS-CFAR)[2]. В данном случае в элементах «+» схемы, приведенной на Рисунке 2, вместо усреднения выполняется обработка сигналов с использованием статистических методов. Значения амплитуд сигналов в ячейках скользящих окон вначале ранжируются по амплитуде. Некоторое количество самых больших значений исключается из дальнейшей обработки. По оставшимся значениям определяется среднее (CAOS-CFAR) и/или выполняется дополнительная весовая обработка, например, в зависимости от среднего уровня шума (OS-CFAR).
Здесь также может выполняться раздельная обработка ячеек до и после анализируемой. Среди полученных результатов, так же как и в описанных выше методах, выбираются наибольшее (OSGO-CFAR) или наименьшее (OSSO-CFAR) значения, которые используются в дальнейшей обработке.[3]
Достоинством метода OS-CFAR является гораздо большая эффективность определения порога обнаружения. Смежные эхо-сигналы теперь не будут накрывать своими порогами друг друга.
Основным недостатком метода является необходимость больших вычислительных ресурсов, требуемых для выполнения алгоритмов сортировки. Такие вычислительные ресурсы должны быть обеспечены на этапе обработки радиолокационных сигналов в реальном времени, поскольку вычисление порога выполняется до момента обнаружения цели.
CASH-CFAR
Метод стабилизации уровня ложной тревоги с использованием статистики Хофеля (Cell-Averaging Statistic Hofele CFAR, CASH-CFAR), также являющийся статистическим методом, был разработан Францем Ксавером Хофелем (Franz Xaver Hofele),[4] сотрудником бывшего DASA (Daimler-Benz Aerospace AG), ныне Hensoldt. Метод основан на применении ряда суммирующих элементов, связанных с каждой ячейкой дальности, и специального детектора максимума-минимума.[5] Преимуществом метода CASH-CFAR является то, что при его использовании устраняется возможность взаимного накрытия порогами смежных эхо-сигналов. В то же время их боковые лепестки, возникающие в результате сжатия импульса, надежно накрываются уровнем порога. Требуемые для реализации метода CASH-CFAR вычислительные ресурсы существенно меньше тех, что требуются для методов OS- и CAOS-CFAR методов с их алгоритмами ранжирования.
MAMIS-CFAR
Метод стабилизации уровня ложной тревоги на основе статистики максимума-минимума (MAximum MInimum Statistic, MAMIS) по сути аналогичен методу CASH-CFAR за исключением того, что сумматоры CASH-CFAR заменяются специальной схемой максимума-минимума (например, такой как микросхема FPGA, программируемая пользователем вентильная матрица).
Характеристики метода MAMIS-CFAR одинаковы с характеристиками метода CASH-CFAR для обработки точечных и распределенных целей на фоне участков помех.
Обратная частота ложных тревог
Частота ложных тревог может быть преобразована в обратную частоту ложных тревог тривиальным обращением. Для этого обращается (инвертируется) значение, вычисленное по формуле (1). Иным способом вычисления обратной частоты ложных тревог является использование соотношения:
| IFAR = | 1 | = | T | = T·Btx | где | FAR = частота ложных тревог; T = средний интервал между двумя зондирующими импульсами Λ = длительность ложной тревоги; Btx = ширина спектра зондирующего сигнала. |
(4) |
| FAR | Λ |
Для импульсного радиолокатора, использующего простые радиоимпульсы, длительность ложной тревоги Λ равна длительности импульса. Для радиолокатора, использующего сигналы с внутриимпульсной модуляцией, длительность ложной тревоги может быть определена только после сжатия импульса. По этой причине в расчетах используется ширина спектра зондирующего сигнала Btx как мера коэффициента сжатия импульса, а также как мера потенциального разрешения по дальности..
Источники и ресурсы:
- H. M. Finn and R. S. Johnson, ”Adaptive detection mode with threshold control as a function of spacially sampled clutter-level estimates;” RCA Rev., vol. 29, pp. 141-464, September 1968.
- Rohling, Hermann ”Ordered statistic CFAR technique – an overview”, Radar Symposium (IRS), 2011 Proceedings International, On page(s): 631 – 638, Volume: Issue:, 7-9 Sept. 2011
- Long Cai, Xiaochuan Ma, Qi Xu, Bin Li, Shiwei Ren ”Performance Analysis of Some New CFAR Detectors under Clutter”, Journal of Computers, Vol 6, No 6 (2011), 1278-1285, Jun 2011 (doi:10.4304)
- F. X. Hofele, ”An innovative CFAR algorithm,” in Proc. CIE Int. Conf. Radar, 2001, pp. 329–333.
- Patent DE 19600779 A1 Verfahren zur Erzeugung einer Clutter-Schwelle und Anordnungen zur Durchführung des Verfahrens