Ce este o alarmă falsă?
Rata alarmelor false
Semnalele de zgomot apar într-o manieră distribuită statistic cu amplitudini care corespund celor ale semnalelor utile și sunt prelucrate ca atare. Acest lucru duce la afișarea de „ținte false”. Rata de alarmă falsă este numărul mediu de „ținte false” care pot fi detectate la ieșirea receptorului într-un anumit interval de timp (de exemplu, la fiecare rotație a antenei sau numai într-o perioadă de impulsuri). Acesta ar trebui să fie cât mai mic posibil. Rata alarmelor false (FAR) poate fi calculată cu următoarea formulă:
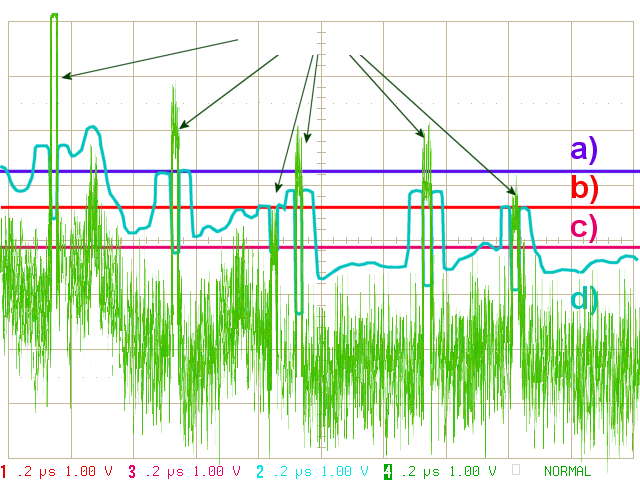
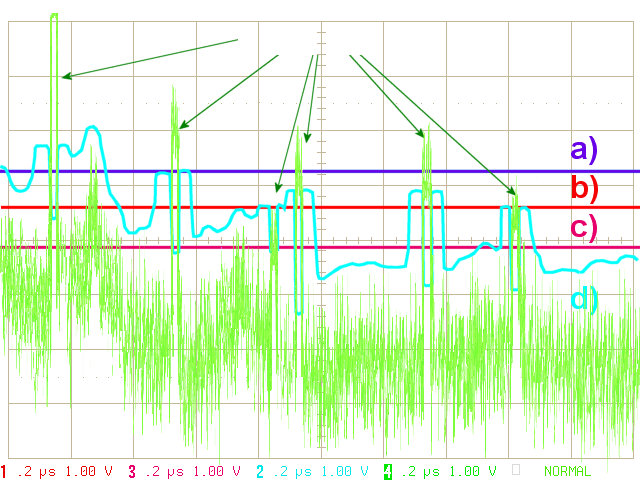
Ilustrație 1: Valori de prag în prelucrarea semnalelor radar
{kind=link}
| FAR = | Ținte false pe perioadă de impuls | (1) |
| numărul de celule de rezoluție |
Un număr maxim de ținte false este determinat de numărul de detecții posibile ale țintelor. Pentru un radar digital, acesta este numărul de celule de rezoluție a intervalului. (Pentru un radar analogic, numărul maxim de ținte false posibile este determinat de raportul dintre timpul de recepție și perioada impulsului de emisie). Figura 1 prezintă o perioadă de impulsuri care conține șase ținte reale. Numai acele semnale care depășesc pragul respectiv sunt afișate pe o unitate de afișare.
- valoare de prag prea mare: probabilitatea de detectare = 66%
- Prag optim: probabilitatea de detectare = 83%
o alarmă falsă!
rata de alarmă falsă = 1 / 666 = 1,5 ·10-3 ¹) - Valoarea pragului este prea mică: rata alarmelor false este mult prea mare!
- Valoarea pragului este variabilă: rata constantă de alarme false pe întreaga deviație, dar, în comparație cu linia b), o probabilitate de detectare mai mare (chiar și a șasea țintă din imagine este detectată).
O altă posibilitate de a obține ținte false este, de exemplu, apariția unei depășiri. În practică, cu procesarea digitală a țintelor se tolerează rate de alarmă falsă de ordinul a aproximativ 10-4 până la 10-3. Cu toate acestea, în cazul unei reprezentări analogice, sunt acceptate valori mult mai mari, deoarece selecția țintei este efectuată în cele din urmă de un operator inteligent.
Rata de alarmă falsă depinde de nivelul tuturor interferențelor, cum ar fi zgomotul, ecourile țintei fixe și radiațiile de interferență în receptor. La distanță mică, predomină influența țintelor fixe, în timp ce la distanță mare, predomină influența zgomotului. Prin urmare, rata de alarmă falsă are, în mod normal, valori diferite în zona apropiată și în zona îndepărtată, dar este luată în considerare cel puțin pentru întreaga perioadă de impuls.
¹) pentru un radar cu o rază de acțiune de 100 km și o durată a impulsului de 1 µs = 666 celule de rezoluție a razei de acțiune.
Rata constantă a alarmelor false (CFAR)

video
ieșire
b) Greatest Of: CAGO-CFAR
c) Smallest Of: CASO-CFAR
Ilustrație 2: Principiul unui circuit „Cell-averaging CFAR”.

video
ieșire
b) Greatest Of: CAGO-CFAR
c) Smallest Of: CASO-CFAR
Ilustrație 2: Principiul unui circuit „Cell-averaging CFAR”.
video
ieșire
b) Greatest Of: CAGO-CFAR
c) Smallest Of: CASO-CFAR
Ilustrație 2: Principiul unui circuit „Cell-averaging CFAR”.
Principiul unui circuit cu rată de alarmă falsă constantă a fost descris pentru prima dată în 1968 de H. M. Finn și R. S. Johnson.[1]
În raza de acțiune apropiată a unui radar, apare de obicei o interferență puternică din partea țintelor fixe. Nivelul de zgomot se suprapune apoi peste acest nivel. Dacă nivelul de prag este o tensiune continuă constantă de curent continuu, atunci, la distanță mică, probabilitatea unei alarme false este mult mai mare decât la distanță mare. În același timp, probabilitatea de detectare este mult mai mică la distanță mare decât la distanță mică.
O soluție la această problemă conduce la circuite care pot varia pragul nu ca un nivel constant, ci ca o funcție ajustată a condițiilor de mediu percepute, rezultând o rată constantă de alarmă falsă (CFAR) pe întreaga durată a excursiei. Deoarece alarmele false care, în caz contrar, apar adesea la distanțe mici pot fi mai bine suprimate, probabilitatea de a detecta ținte la distanțe mari se îmbunătățește: statistic vorbind, acest lucru crește astfel raza de acțiune a radarului.
Rata constantă de alarmă falsă la medierea celulelor (CA-CFAR)
În exemplul din figura 1, curba d) reprezintă o evoluție adaptată a valorii de prag actuale la nivelul nivelului de zgomot. Perturbarea, care ar declanșa o alarmă falsă la începutul excursiei chiar și pentru tensiunea de prag a), atinge și aici un nivel critic. Cu toate acestea, cel de-al treilea ecou al țintei, care este atât de slab încât ar fi pierdut chiar și în cazul pragului optim b), devine un semnal țintă detectat în mod fiabil în CFAR.
Circuitul din figura 2 prezintă un principiu simplificat. Semnele de sumă reprezintă ecuația:

Ilustrație 3: Comparația pragurilor diferitelor metode CFAR pentru situația a două caractere țintă adiacente:
caracterul țintă mai slab este ascuns de cel mai puternic în metodele de calcul al mediei celulelor.[2]

Ilustrație 3: Comparația pragurilor diferitelor metode CFAR pentru situația a două caractere țintă adiacente:
caracterul țintă mai slab este ascuns de cel mai puternic în metodele de calcul al mediei celulelor.[2]
 (2)
(2)
În CA-CFAR, această calculare a mediei se realizează, de asemenea, în ansamblul „logică aritmetică”.
Faptul că curba CA-CFAR din Fig. 3 prezintă deviații puternice în stânga și în dreapta caracterelor țintă, dar are o valoare relativ scăzută la caracterul țintă propriu-zis, poate fi explicat destul de ușor din schema de principiu (Fig. 2). Cu puțin timp înainte de caracterul țintă, amplitudinea caracterului țintă este inclusă în valoarea medie, ceea ce înseamnă că aceasta crește considerabil valoarea pragului. Exact în celula de gamă testată (RUT, denumită uneori și celulă testată, CUT), amplitudinea mare a caracterului țintă nu este inclusă în calcul. Prin urmare, valoarea pragului este acum brusc mult mai mică. Ulterior, această amplitudine este luată din nou în considerare și ridică din nou pragul. Astfel, CFAR realizează o îmbunătățire a contrastului pentru caracterele țintă puternice. Cu toate acestea, caracterele țintă foarte slabe pot fi pierdute într-un mediu de semnal de interferență mai degrabă decât cu un prag fix. O modalitate de a reduce ușor aceste pierderi este de a nu include în analiză cele două celule apropiate de RUT (indicate ca linii punctate în circuitul din figura 2). Aceste celule nefolosite se numesc celule de gardă. Celulele rămase se numesc celule ale ferestrei de referință.
CAGO-CFAR
În Cell-Averaging Greatest Of- Constant False Alarm Rate (CAGO-CFAR), logica aritmetică este împărțită într-o ramură înainte de celula testată și o ramură după. Se calculează o valoare medie în ambele căi de procesare. Numai cea mai mare dintre cele două valori este utilizată pentru procesarea ulterioară:

 (3)
(3)
Avantajele CAGO-CFAR sunt puterea de calcul redusă necesară și pierderile relativ scăzute ale țintelor. În comparație cu CA-CFAR, gestionarea mediilor de semnal de interferență neomogene este îmbunătățită.
Dezavantajele sunt eficacitatea încă scăzută, precum și posibilitatea, tipică pentru toate variantele CA-CFAR, ca două caractere țintă învecinate să se ocolească reciproc (a se vedea figura 3). Problemele sunt cauzate, de asemenea, de o schimbare bruscă a semnalelor de interferență (de exemplu, la marginea unor zone țintă fixe mai mari).
CASO-CFAR
Celula de calcul al celui mai mic număr de celule (Cell-Averaging Smallest Of- Constant False Alarm Rate, CASO-CFAR) utilizează același circuit ca și CAGO-CFAR. Singura diferență este că, în loc să se folosească valoarea cea mai mare a semnalului de ieșire a ambelor lanțuri de întârziere, acum se folosește cea mai mică. Astfel, nivelul mai mare al semnalului țintă adiacent nu este, de obicei, utilizat pentru calcularea pragului. Acest lucru reduce într-o oarecare măsură pericolul ca două caractere țintă învecinate să se poată masca reciproc.
CAOS-CFAR sau OS-CFAR
Deoarece metodele anterioare nu pot trata în mod egal ambele extreme ale mediului de interferență (mediu de interferență omogen și neomogen), au fost dezvoltate metodele statistice ordonate (OS).[2] În circuitul din figura 2, cele două simboluri logice cu semnul plus sunt înlocuite de o metodă statistică. Primul pas este să sortați toate valorile în ordinea mărimii. Un anumit număr dintre cele mai mari valori sunt excluse de la prelucrarea ulterioară. Din valorile rămase, se poate forma din nou o medie (CAOS-CFAR) sau se pot aplica alte ponderări (de exemplu, în funcție de nivelul mediu de zgomot) (OS-CFAR).
Din nou, se poate face o separare separată între celulele precedente și cele următoare. Rezultatele individuale ale acestora pot fi selectate din nou ca fiind cele mai mari (OSGO-CFAR) sau cele mai mici (OSSO-CFAR) înainte de a fi prelucrate în continuare.[3]
Avantajul OS-CFAR este eficiența mult mai bună a pragului. Caracterele țintă vecine nu se mai pot ascunde reciproc. Cu toate acestea, principalul dezavantaj este efortul imens de calcul care trebuie efectuat în timpul procesării în timp real a semnalelor radar, deoarece calculul pragului este încă înainte de detectarea țintei. În acest caz, durata calculului nu ar fi atât de decisivă, dacă ar fi constantă pentru fiecare celulă de apel. Dar o sortare are un timp de calcul diferit în funcție de secvența datelor. Acest lucru este foarte nefavorabil pentru procesarea în timp real.
CASH-CFAR
Așa-numita CASH-CFAR (de la Cell Averaging Statistic Hofele) este o altă metodă statistică dezvoltată de Franz Xaver Hofele, angajat al fostei DASA (astăzi: Hensoldt),[4] care se bazează pe o serie de elemente de însumare și pe un detector special de maxim-minimum.[5] Această metodă obține aceleași avantaje ca și OS-CFAR. Două personaje țintă adiacente nu se mai pot masca reciproc. Lobii lor laterali temporali de la compresia impulsurilor sunt mascați în mod fiabil de prag. Cu această metodă, sortarea, care necesită mult timp, poate fi omisă, astfel încât efortul de calcul este redus semnificativ.
MAMIS-CFAR
MAMIS-CFAR (MAximum MInimum Statistic) este, în esență, același lucru ca și CASH-CFAR. Elementele de adunare din CASH-CFAR sunt înlocuite aici cu o formă specială a detectorului maxim-minimum (de exemplu, ca o componentă FPGA).
Rata inversă de alarmă falsă
Rata inversă de alarmă falsă (IFAR) este, de asemenea, adesea utilizată în statistică. Acesta poate fi calculat ca în ecuația (1) și apoi inversat. Un alt mod de calcul este în timp:
| IFAR = | 1 | = | T | = T·Btx | mit | FAR = Rata de alarmă falsă. T = intervalul mediu dintre două impulsuri de transmisie Λ = durata alarmei false Btx = lățimea de bandă a impulsurilor de transmisie |
(4) |
| FAR | Λ |
Pentru un radar cu impulsuri simple, durata unei alarme false Λ este egală cu durata impulsului de transmisie τ. În cazul radarelor cu modulație intrapuls, durata unei alarme false poate fi măsurată numai după comprimarea impulsurilor. Din acest motiv, există, de asemenea, calcule în care lățimea de bandă a impulsurilor de transmisie Btx este utilizată ca o măsură pentru rata de compresie a impulsurilor, precum și pentru rezoluția posibilă a domeniului.
Surse:
- H. M. Finn and R. S. Johnson, ”Adaptive detection mode with threshold control as a function of spacially sampled clutter-level estimates;” RCA Rev., vol. 29, pp. 141-464, September 1968.
- Rohling, Hermann ”Ordered statistic CFAR technique - an overview”, Radar Symposium (IRS), 2011 Proceedings International, On page(s): 631 - 638, Volume: Issue:, 7-9 Sept. 2011
- Long Cai, Xiaochuan Ma, Qi Xu, Bin Li, Shiwei Ren ”Performance Analysis of Some New CFAR Detectors under Clutter”, Journal of Computers, Vol 6, No 6 (2011), 1278-1285, Jun 2011 (doi:10.4304)
- F. X. Hofele, ”An innovative CFAR algorithm,” in Proc. CIE Int. Conf. Radar, 2001, pp. 329–333.
- Patent DE 19600779 A1 Verfahren zur Erzeugung einer Clutter-Schwelle und Anordnungen zur Durchführung des Verfahrens